
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств нию телеметрируемых величин на входе РТС Наряду с нелинейностью всякая РТС обладает нестабильностью характеристик приводящих к искажению результатов измерений. Влияние нестабильности характеристик РТС на точность радиотелеизмере-кий существенно уменьшается путем калибровки РТС в процессе работы Таким образом, в результате дешифрирования должна быть установлена истинная зависимость изменений телеметрируемой величины от времени для каждого канала с учетом искажений, вносимых элементами РТС. Знание такой зависимости для всех одновременно телеметрируемых величин позволяет установить их связь друг с другом, что во многих случаях является одной из важнейших задач исследования. Процесс дешифрирования осциллографической записи сводится к следующим операциям: определение смещения точек кривой записи телеметрируемого сигнала от нулевой или некоторой вспомогательной калибровоч ной линии, записываемой иа ленте вместе с линией записи сигнала; преобразование измеренных смещений при помощи предварительно снятой калибровочной кривой РТС в истинное значение телеметрируемой величины в тех же единицах, в которых она измерялась на входе РТС; представление результатов дешифрирования в виде графика (или таблицы) зависимости телеметрируемой величины от-времени или зависимости одной телеметриру емой величины от другой. В процессе дешифрирования при пересчете зарегистрированных значений принятых сигналов в исходные значения телеметрических величин пользуются калибровочным сигналом. Масштаб передачи калибровочного сигнала при наличии искажений в радиолинии изменяется аналогично изменению масштаба телеметрируемых величин. Поэтому при известном значении калибровочного напряжения можно установить величину коэффициента передачи с учетом искажений, вносимых радиолинией. В системах с ВРК калибровочный сигнал представляет собой определенное постоянное или изменяющееся известным образом напряжение, которое вырабатывается датчиком калибровочных напряжений. Часто в РТС с первичной ШИМ или ФИМ, где нелинейность амплитудной характеристики радиолинии системы не оказывает существенного влияния на точность измерений, передаются два калибровочных напряжения: нулевой уровень (нуль) измеряемых величин и напряжение, соответствующее 90% от максимально возможного. Для передччи этих двух калибровочных напряжений используется два канала РТС. При дешифрировании калибровочные напряжения позволяют скомпенсировать дрейф кулевого уровня и изменение масштаба передаваемых сигналов. При АИМ обычно передают до 10 калибровочных напряжений (диапазон изменения измеряемых величин от нуля до максимального значения разбивается равномерно на 10 уровней). В этом случае уровни калибровочного напряжения используются для компенсации нулевого уровня и 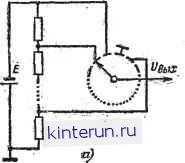
Рис. 26-41. Датчик калибровочного напряжения. а - схема; б - диаграмма выходного напряжения. изменения масштаба передаваемых сигналов, а также позволяют учесть нелинейность амплитудной характеристики радиолинии РТС при дешифрировании записей. Формируются 10 уровней калибровочного напряжения с помощью дополнительного коммутатора (рис. 26-41, с), выход которого подключается к входу одного из каналов РТС. Скорость переключений в дополнительном коммутаторе выбирается такой, чтобы каждый уровень (рис. 26-41, б) калибровочного напряжения передавался в течение времени передачи нескольких кадров. В РТС с ЧРК калибровка радиолинии осуществляется с помощью датчика калибровочных напряжений, выход которого поочередно подключается посредством специального коммутатора к отдельным каналам вместо датчиков. Наличие в шифраторе датчика калибровочных напряжений и специального коммутатора значительно усложняет передающую часть РТС. Поэтому указанные элементы подключаются к системе только на время калибровки, которая проводится в этом случае только перед началом работы системы. При использовании в процессе дешифрирования калибровочного напряжения отсчет значений телеметрических сигналов вы- гюлняется в относительной форме, т. е. в процентах от всей шкалы (максимально возможного значения с/д.маКс, которое может принять телеметр ируемая величина (рис. 26-42). Перед началом работы РТС снимаются тарировочиые характеристики датчиков (зависимость выходной электрической величины датчика от значения входного телемет-рируемого параметра) с тем, чтобы учесть Носитель информации и найденному отношению h/H рассчитывается напряжение на выходе датчика  Рис. 26-42. Иллюстрация дешифрирования записи телеметрических сигналов. нелинейность этих характеристик при дешифрировании. Рассмотрим кратко пример дешифрирования записи сигналов в РТС с первичной АИМ. Пусть телеметрируемая величина S преобразуется датчиком в электрическое напряжение £/д. Причем UR=KnS, где Кк - коэффициент преобразования датчика, в общем случае (при нелинейной тарировочной характеристике датчика) зависящий от мгновенных значений величины S. При максимальном значении телеметрируемой величины SM8HC напряжение иа выходе датчика составит с/д.макс=/(д5макс. Значение напряжения t/д.макс передается по отдельному каналу радиолинии как калибровочное напряжение (для всех каналов). На приемной стороне РТС регистрируются значения t/д.макс, Un и нулевой уровень телеметрируемой величины U0 (рис. 26-41,6). На рис. 26-42 значению с/д.макс соответствует линия, прочерченная на расстоянии Н от линии нулевых значений. Текущему значению Us соответствует плавная кривая с текущими ординатами А. Если РТС линейна, то при всех значениях h соблюдается следующее соотношение: (26-22) п С/д.макс Ручная дешифрация записи каждого измеряемого параметра производится в следующем порядке. Для выбранных моментов времени определяются по пленке величины ft и Я (в миллиметрах) и подсчитывается отношение h/H. По известному с/д.макс д.макс (26-23) При известном UK по тарировочной кривой датчика определяется значение измеряемого параметра S. в случае, если РТС нелинейна, h/Нф ¥=Uk/Uk.ms.kc- Для устранения-влияния нелинейности РТС на точность дешифрирования, а также для более удобного определения отношения h/H, на пленку, как уже отмечалось выше, записываются 10 уровней калибровочного сигнала. Каждый из уровней кратеи 10% от Ux.mbkc (рис. 26-41,6). Относительное значение h как части от Н отсчитывается по ближайшему уровню калибровочного сигнала. Таким образом, по записи сразу без измерения в отдельности h и И можно определить отношение h/H (с учетом нелинейности РТС) и подсчитать по выражению (26-23) величину UK. Далее с помощью тарировочной кривой датчика определяется значение S. Ручной процесс дешифрирования многоканальной радиотелеметрической информации весьма сложен и требует много времени. В связи с этим большое распространение получают цифровые РТС, позволяющие полностью автоматизировать процесс дешифрирования телеметрической информации. Автоматизация процесса дешифрирования необходима для сокращения времени обработки телеметрических записей и особенно в тех случаях, когда результаты телеизмерений нужно использовать немедленно. Процесс автоматического дешифрирования в общем случае включает следующие наиболее важные операции: ввод поправки на нелинейность канала; ввод поправки на сдвиг тарировочной кривой канала (уход нулевого и максимального уровней); ввод поправки на нелинейность и сдвиг тарировочной кривой датчика; умножение относительной величины, полученной после введения всех поправок, на максимальное значение телеметрируемого параметра SMaK0. ЛИТЕРАТУРА (.Барсуков Ф. И., Максиме в М. В., Радиотелеметрия, Воениздат, 1962. 2. Кантор А. В., Аппаратура и методы измерения при испытаниях ракет, Оборонгиз, 1963. 3. Тепляков И. М., Радиотелеметрия, изд-во Советское радио , 1966. 4. К а р а м о в 3. С, Ф о м и н А. Ф., Элементы аналоговых радиотелеметрических систем, изд-во Энергия , 1966.  РАЗДЕЛ 27 РАДИОУПРАВЛЕНИЕ СОДЕРЖАНИЕ 27-1. Принципы построения и функциональные схемы систем радиоуправления . . 556 Принципы построения систем радиоуправления (556). Неавтономные системы радиоуправления (558). Автономные системы управления (563) 27-2. Параметры рассогласования и кинематические уравнения при управлении движением летательных аппаратов . . . 564 Общие сведения (564). Параметры рассо гласования и кинематические уравнения при наведении по фиксированным опорным траекториям (564). Параметры рассогласования и кинематические уравнения при иакеденни по нефиксированным опорным траекториям (568) 27-3. Координаторы радиотехнических систем самонаведения..........576 Функциональные схемы радиотехнических координаторов систем самонаведения (576). Угломерные устройства и измерители угловой скорости линнн визирования в координаторах систем самонаведения (578) 27-4. Координаторы систем управления по ра- . диозоне.............58S Координаторы систем управления по радиолучу (586). Координаторы о радионавигационными измерителями (588) 27-1. ПРИНЦИПЫ ПОСТРОЕНИЯ И ФУНКЦИОНАЛЬНЫЕ СХЕМЫ СИСТЕМ РАДИОУПРАВЛЕНИЯ Принципы построения систем радиоуправления Системы радиоуправления представляют собой совокупность приборов и устройств, осуществляющих управление различными объектами на расстоянии с помощью радиосредств. Управляемыми объектами (УО) могут быть космические корабли, аппаратура, установленная на искусственных спутниках Земли, авиационные модели, ракеты, насосные станции в нефтеперерабатывающей промышленности и т. д. Простейшими являются системы радиоуправления, служащие для изменения со- 27-5. Координаторы систем командного радиоуправления и автономных систем радиоуправления ...........594 Функциональные схемы координаторов для систем командного радиоуправления (594). Визирные устройства (596). Счетно-решающие приборы и структурные схемы координаторов (597). Координаторы автономных систем радиоуправления (599) 27-6. Устройства формирования команд . 600 27-7. Командные радиолинии управления (602). Функциональная схема и основные характеристики командной радиолинии управления (602). Шифраторы и дешифраторы КРУ с шнротно-импульсной модуляцией синусоидальных поднесущих колебаний (604). Шифраторы и дешифраторы КРУ со счетно-нмпульсной модуляцией поднесущих колебаний (606). Шифраторы и дешифраторы КРУ с фазово-нмпульсной модуляцией- поднесущих колебаний (609) Шифраторы и дешифраторы КРУ с кодо-импульсной модуляцией поднесушнх колебаний (610). Командные радиолинии управления для передачи разовых команд (612) 27-8. Исполнительные устройства и управляемые объекты.........614 Исполнительные устройства (614). Управляемые объекты (615) Литература ............. 615 стояния УО в заранее заданные моменты времени. Так, может оказаться, что на определенное время суток требуется включать дополнительные насосы, с помощью которых производится нагнетание воды в места залегания нефти для ее вытеснения на поверхность Земли. Когда надобность в работе этих насосов отпадает, их необходимо выключить. Подобная же система необходима для включения и выключения радиотехнических устройств (например, телевизионных установок и радиотелеметрических передатчиков), устанавливаемых на искусственных спутниках Земли. Существенным в этих случаях является устранение системой управления имеющегося несоответствия между тем, что должно быть и что есть в действительности к данному моменту времени. Более сложны системы, предназначенные для управления движением в широком,
|
|||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


