
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств 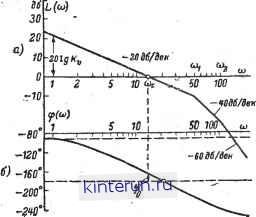 Рис. 21-S7. ЛАХ и ЛФХ разомкнутой система (пример). G0-запас устойчивости по амплитуде (5 дб); Фо - запас устойчивости по фазе (18°); и>с- частота среза (12 1/се/с). ния ЛАХ на частоте со = I откладывается величина 201gA\,=20 lg 15=23,4 дб (или на оси частот величина л%> = 15 1/сек) и через полученную точку проводится прямая с наклоном - 20 дб/дек (это соответствует интегрирующему звену Къ/р). После первой частоты сопряжения со, =50 1/се/с вследствие наличия инерционного звеиа наклон ЛАХ увеличится еще на -20 дб/дек и будет составлять -40 дб на декаду. После второй частоты сопряжения шг= 100 1/сек наклон ЛАХ вследствие наличия второго инерционного звена увеличивается до -60 дб на декаду. Фазовая характеристика строится путем добавления к прямой -я/2 (фазовый сдвиг интегрирующего звена) фазовых характеристик двух инерционных звеньев. Суммарная ЛФХ при со-* 0 стремится к асимптоте -3/2 я 2. Построение Р(ш). Для выбранной частоты со по известным ЛАХ и ЛФХ [/.(со) и <р(со) с помощью номограммы (см. рис. 21-56)] находится точка Р(ш). Так, для частоты со=5 I/сек Z.(5) = +8 дб; ср(5) = =-125°. На номограмме этим данным соот ветствует точка А (5), лежащая на кривой Р с индексом 1,1 [т. е. Р(5) = 1,1]. Для со =40 I/сек Р(40) =-10 дб; ср(40) =-204°; точка Л (40) лежит вблизи кривой с индексом -0,4, т. е. Р(40) =-0,35 и т. д. Так, по точкам построена кривая Р(ш) (рис. 21-58, с). 3. Разбиение Р(со) на трапеции (рис. 21-58,6) производится каждый раз в соответствии с видом кривой Р(со). В данном случае Р(ш) можно приближенно изобра зить четырьмя отрезками прямых (пунктирная кривая). Полученная фигура является суммой трапеций 1+11+111+IV. Характерные частоты coi=10 I/сек; шц=20 1/сек; сот=40 1/сек; coiv = 100 1/сек. В результате сложения всех трапеций образуется фигура, близкая к исходной вещественной частотной характеристике Р(ш) (пунктир на рис. 21-58,а). 4. Нахождение переходной характеристики h(t) (рис. 21-58,в,г). Строятся переходные характеристики для каждой из трапепий: /i0i(t), /г0ц(т), ftoin(f), ftoiv(T) и характеристики hi(t), hn(t),hui(t), hiv(t). Трапеция /. Определяем величину coj 10 х =-= - =0,5. cojj 20 По таблице fto-функций находим колонку х=0,5 и выписываем зависимость Aoi(t). Затем изменяем масштабы: по оси ординат- растягиваем в Pi (0) =2,64 раза и по оси времени - сжимаем в шц=20 раз. В результате находим hi(t). При t-*co , Ли (г)-2,64. 0 Трапеция . Определяем хц=-=0 (первая колонка Л0-функций). Ординаты h0u этой колонки увеличиваем в Рц (0) = =-0,44 раза; по оси времени сжимаем масштаб в coi=IO раз. В результате получаем Ли (О- Трапеция /. Определяем: со 20 III По оси ординат данные /г0(т) для колонки х.=0,5 умножаем на -0,8; по оси абсцисс данные т делим на сош=40. Находим hm(t). Трапеция IV. Определяем: а111 40 - = 7 = 0.4. По оси ординат данные для Л0(т) умножаем на -0,4; по оси абсцисс данные времени т делим на coiv = IOO. Находим hiv{t). Для получения переходной характеристики h(t) суммируем полученные кривые (рис 21-58,г): h (t) = ftt (0 + hu (t) + hm (t) -f hlv (t). В данной системе имеет место значительное перерегулирование (около 70%) и сравнительно большое время регулирования tp=0,5 сек (отсчитывается на уровне, отличающемся на ±10% от установившегося). При t -* оо характеристика h (t) стремится к Л(оо)=1. Этого следовало ожидать, поскольку система является астатической. Во многих случаях практики вместо вычисления переходных характеристик удобно воспользоваться методом моделирования системы с помошью аналоговых вычислительных машин (см. разд. 24). При этом производится набор элементов, входящих в состав данной системы, устанавливаются нужные параметры этих .элементов 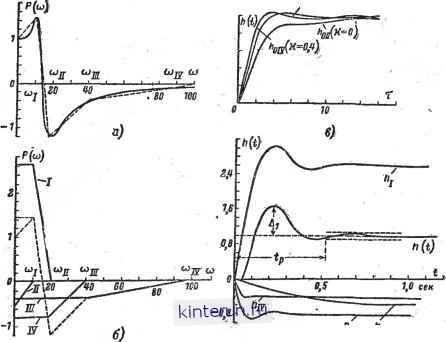 Рис. 21-58. Построение переходной характеристики системы. С - вещественная частотная характеристика, построенная с помощью номограммы (пунктиром обозначена приближенная характеристика); б - разбиение вещественной частотной характеристики Р(©) на трапецеидальные i-iv (пунктирная - приближенная характеристика); в - Л0-функции для трапеций ft0j-Ладу; г~ построение суммарной (переходной) характеристики h(t) + ftjу (характеристики ftj-ft,у построены путем пересчета масштабов характеристик ht hl+hll+hlll + ftoiv (в случае необходимости изменяется масштаб времени) и определяется реакция системы на ступенчатое воздействие- Обладая простотой и наглядностью, метод моделирования позволяет не только анализировать свойства системы под воздействием ступенчатых сигналов, но выяснить, как будет действовать система под влиянием более сложных сигналов, подобных тем, которые имеют место в реальных условиях ее работы. Более того, часто моделирование используется для подбора корректирующих цепей. Чем сложнее система регулирования, тем целесообразнее использование моделирующих устройств. влияние корректирующих устройств иа качество регулирования Связь качества регулирования с характеристиками разомкнутых систем. Если качество процессов регулирования для заданных параметров не удовлетворяет поставленным требованиям (например, велико гр, Аь Аз и т. д.), то в систему вводят дополнительные корректирующие элементы и выбирают их характеристики так, чтобы удовлетворить этим требованиям. Подбор параметров корректирующих элементов проводится путем использования ЛАХ и ЛФХ разомкнутой системы. Для наиболее часто встречающихся в практике минимально-фазовых систем достаточно использовать только ЛАХ разомкнутой системы, поскольку ЛАХ и ЛФХ в таких системах связаны функциональной зависимостью. При подборе корректирующих цепей сначала строится желаемая ЛАХ системы (т. е. такая ЛАХ, для которой переходная характеристика имеет благоприятную форму и заданное tp). Затем путем вычитания желаемой ЛАХ из действительной находят ЛАХ корректирующей цепи, по которой затем определяют вид и параметры этой цепи. Решающее влияние на характер переходного процесса оказывает вид ЛАХ на средних частотах вблизи частоты среза сос. Установлено, что благоприятное протекание переходного процесса имеет место только в том случае, если ЛАХ вблизи шс имеет наклон - 20 дб на декаду, причем длина этого участка должна быть порядка одной декады. Низкочастотный участок ЛАХ определяет поведение системы в установившемся режиме. В астатической системе наклона ЛАХ на этих участках составляет -20 k дб/дек (k - порядок астатизма); в статической системе Наклон составляет 0 дб на декаду (й=0). Высокочастотный участок (при ш><вс) существенного нлияния на переходную характеристику не оказынает. Для подбора желаемой ЛАХ имеются подробные номограммы, справедливые для ЛАХ, имеющей низкочастотный участок и участок вблизи частоты среза с наклоном -20 дб/дек и два остальных участка с наклоном -40 дб/дек (рис. 21-59). Однако номограммы на рис. 21-60 дают также при-
Рис. 21-59. Типовая ЛАХ автоматической системы, для которой построены номограммы. емлемые результаты для статических и астатических систем с наклоном ЛАХ на участке ев]-со2 -60 дб на декаду. Номограммы позволяют определить следующие данные (рис. 21-61): tv - время регулирования (отсчитываемое от нуля до момента, после которого h (t) отличается от установившегося значения не более чем на 5%); ty - время достижения первого выброса; Нт - максимальное значение первого выброса; Фт, Ют - величину максимума ам-плитудио частотной характеристики замкнутой системы и частоту, на которой он достигается (более подробные номограммы - см. [Л. 1, 4]). На номограммах некоторые показатели отнесены к частоте шс. Подбор желаемой ЛАХ требует определенных навыкон. Для грубых прикидок используются 3-7 следующие соотношения: tp=-; жела- ис со3 тельное отношение частот 2< -<4; про- тяженность участка, лежащего вблизи сос, должна быть возможно большей и иметь порядок не менее одной декады. Путем нескольких проб с учетом приведенных соотношений выбирается желаемая ЛАХ и сравнением с действительной ЛАХ, которую имеет система, находят ЛАХ корректирующего звена. Затем подбирается корректирующая цепь и определяются ее параметры. Величина шс может быть приближенно найдена по известной передаточной функции разомкнутой системы W(p) = pk (TlP+l) (7>+1) K{tiP+ 1)(т2р+ 1)---(тг р + 1) (7>+1) (21-32) Г(Т1р+\)(Тгр+\)- (Tqp + 1) - (21-33) без построения ЛАХ. Частоты среза выражаются следующими формулами: k+q. для соотношения (21-32) и k+q-г г-- для соотношения (21-33). В приведенных формулах постоянные времени расположены в порядке убывания, т. е. Г1>7-2>...>Гд, Ti>T2>T3>...>Tr. Пример. Дана следящая система с передаточной функцией разомкнутой системы W(p) =--, р(Гдвр+1)(Гр+1) Kv = 70 1/сек; Гдв = 0,1 сек; Т = 0,02 сек. Требуется подобрать корректирующую цепь, при которой время регулирования <р=0,3 сек, а Нт< 1,3, fp<2/y . При данных параметрах система неустойчива (см. стр. 49), так как Ккр = тг- + 4 = 10 + 50 = 60 1 дв 1 что меньше Л\>. Исходя из потребного быстродействия, выбираем: сос = - = 13,3 сек. tP Соотношение ш3/сос4 определит ори-ентироночное значение соз4шс, ш3= =53,5 1/сек. Выберем ш2=4 1/сек; (длина участка со2-ш3 несколько больше декады). Сопрягаем участок со2-ш3 с низкочастотным участком прямой с наклоном -40 дб на декаду (целесообразно строить желаемую ЛАХ так, чтобы наклон, соседних участков отличался на 20-40 дб/дек). При этом получаем: coi=0,8; Ц]=40 дб. По номограмме на рис. 21-60, соответстнующёй отношению со3/сос=4 для 13,3 -=0.06 находим: 0,2; со.. < ср 10 = 0,5; 0,4; Нт = 1,18; Ф 1,2-
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


