
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств погрешности 2Дс/г, обусловленной влиянием всех каналов, к максимальному значению телеметрируемой величины SManc в рассматриваемом канале. Анализ причин, вызывающих переходные и перекрестные искажения, н учет степени влияния этих искажений на результаты радиотелеизмерений, дают возможность сформулировать требования к разделительным фильтрам и технически грамотно выбрать значения поднесущих частот и допустимое число каналов в РТС.
Рис. 26-17. Амплитудно-частотные характеристики фильтров Ф, и Ф2 двух соседних каналов. Переходные искажения. Этот вид межканальных помех возникает из-за недостаточно хорошей фильтрации поднесущих колебаний и может быть даже при идеальной линейной характеристике РТС. На рис. 26-17 представлены частотные характеристики фильтров двух соседних каналов РТС. Как следует из приведенного рисунка, характеристики фильтров перекрываются. Если для простоты предположить, что по обоим каналам передаются сигналы смодулированных поднесущих колебаний coni и Шп2, совпадающих с резонансными частотами соответственно фильтров Ф\ н Фг, то за счет перекрытия частотных характеристик фильтров сигналы частоты сощ первого канала будут попадать во второй канал, а сигналы частоты й>п2 второго канала - в первый, вызывая взаимные искажения. Величина взаимного влияния - каналов при этом будет зависеть от относительных коэффициентов передачи фильтров на частотах соседних каналов р, и р2. Предположим, что модуляция поднесущих отсутствует, а разность поднесущих второго и первого каналов Ай>к=о>п2-Шщ много меньше величины поднесущих частот: АсОк С Шпь Дык<Шп2. Если коэффициент передачи фильтра второго канала имеет вид: Кг = Кг (Доз), где Доз = 03п2 - оз, то напряжение во втором канале будет равно сумме напряжений: С/pes = и4Кх(Ао)к)5ш (bni* + + UzKz(P)sin о)п2/ - Uu sin (unit + + Ui sin сопгг, где Ui -=2(0); t/u=i/iK2(Am ). Первая составляющая правой части последнего выражения (t/jj sinwnif) представляет собой мешающий сигнал первого канала во втором. Поскольку коэффициент передачи второго канала на частоте сигнала первого канала равен (в соответствии с обозначением на рис. 26-17): Кгдоэи) = ръ то максимальная абсолютная ошибка измерения во втором канале при этом составит: Uu = £ЛЯ(Дозк) = UiPi. Следовательно, чем меньше коэффициенты Pi и р2, тем меньше взаимное проникновение (влияние) переходных помех. Уменьшение pi и рг достигается путем большего разноса поднесущих частот и увеличения крутизны спада (прямоугольности) частотных характеристик фильтров в полосе их непрозрачности. Перекрестные искажения. Реальная радиолиния не является линейной системой. В передающей установке нелинейные искажения возникают вследствие нелинейности динамических характеристик усилителей и модуляторов. При этом нелинейные искажения тем больше, чем выше уровень передаваемого сигнала. В приемной установке нелинейные искажения возникают в усилителе низкой частоты и при нелинейном детектировании сигналов промежуточной частоты. В многоканальной радиолинии, когда на сетку модуляторной лампы передатчика и сетку лампы усиления низкой частоты приемника воздействует напряжение всех каналов, максимальная амплитуда результирующего сигнала может достигать значительной величины, равной арифметической сумме поднесущих колебаний всех каналов. Из-за нелинейности РТС при прохождении сигналов образуются гармоники и комбинационные частоты. С увеличением числа поднесущих колебаний существенно возрастает число комбинационных частот (взаимное влияние каналов). Появляющиеся прн этом погрешности телеизмерений, называемые перекрестными искажениями, как правило, нельзя устранить даже при применении разделительных фильтров высокого качества. Величина перекрестных искажений в значительной степени зависит от амплитуды поднесущих колебаний и разноса поднесущих частот. При небольшом числе каналов (порядка 6-8) правильным выбором поднесущих частот удается исключить попадание комбинационных частот в полосы пропускания канальных частотных фильтров приемника. Поэтому при разработке РТС с ЧРК число поднесущих частот (число каналов с частотным разделением) выбирается таким, чтобы перекрестные искажения не превышали заданной величины и не влияли на точность измерений. Обычно число каналов в РТС с ЧРК не превышает 10-12. Таблица 26-2
В системах с первичной ЧМ при прочих равных условиях перекрестные искажения проявляются меньше, чем в РТС с первичной AM. В многоканальных РТС с ЧРК для получения минимальных перекрестных помех при максимальной девиации в 7,5% используются подиесущне частоты, приведенные в табл. 26-2. 26-4. ШИФРАТОРЫ И ДЕШИФРАТОРЫ РТС С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ В приемной установке импульсные серии, соответствующие различным каналам, разделяются по отдельным цепям. Разделение основано на том, что заранее известны промежутки времени (в цикле передачи), в течение которых могут появляться импульсы отдельных каналов. Для определения этих промежутков времени передающей 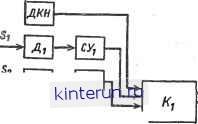 кПРД СУ. -J от ПРМ блок синхронизации Рис 26 18. Функциональная схема РТС с временном разделением каналов. Принцип временного разделения каналов В радиотелеметрической системе с временным разделением каналов (ВРК) передача информации по каналам происходит поочередно в относительно короткий временной интервал. В результате передача радиосигналов по РТС осуществляется прерывисто (дискретно) в виде импульсов, модулированных передаваемым сигналом по амплитуде, ширине или временному положению (фазе). Периодически следующие друг за другом, модулированные телеметрическим сигналом канальные импульсы называют измерительными импульсами. Таким образом, если прн частотном разделении каналов каждому каналу отводится часть общей полосы пропускания радиолинии в течение всего времени ее работы, то при временном разделении каналов каждому каналу представляется вся полоса, но на некоторую часть времени цикла передачи (время, отводимое на разовую передачу сигналов всех каналов). установкой излучаются специальные синхронизирующие импульсы, обозначающие начало каждого цикла передачи (начало цикла опроса всех датчиков). Синхронизирующие импульсы, определяющие темп работы всей РТС, называются тактовыми или кадровыми импульсами. Они следуют с тактовой частотой. Из модулированных импульсов, получаемых в каждой отдельной канальной цепи, после демодуляции выделяются напряжения, характеризующие телеметрируемые величины. Эти напряжения записываются с помощью регистрирующих устройств. Функциональная схема, иллюстрирующая описанный принцип построения многоканальных РТС с временным разделением каналов, представлена на рис. 26-18. Телеметрируемые величины Si, S2, Sn преобразуются датчиками Ди Д2, Дп в электрические величины. Выходные сигналы датчиков поступают в канальные согласующие устройства СУи СУ2, СУ п. Выходы канальных согласующих устройств со- единяются с коммутатором Ки подключающим по очереди телеметрические сигналы каждого из каналов ко входу передатчика для модуляции его высокочастотных колебаний. На выходе коммутатора Ki обычно формируется импульсный сигнал (АИМ). По одному из каналов РТС передается калибровочное напряжение, подводимое к коммутатору от датчика калибровочных напряжений (ДКН). В коммутаторе вырабатываются также синхронизирующие сигналы - синхроимпульсы, отличающиеся от измерительных (канальных) импульсов каким-нибудь параметром (амплитудой, длительностью и т. д). Наиболее часто синхронизирующие импульсы имеют большую длительность, чем измерительные импульсы. Синхронизирующие сигналы необходимо передавать на приемную сторону РТС для того, чтобы коммутаторы приемной и передающей сторон РТС работали синхронно и син-фазно. На приемной стороне сигналы с выхода радиоприемника ПРМ поступают на вход коммутатора Кг и в блок синхронизации. В блоке синхронизации происходит выделение синхронизирующих импульсов, из которых затем формируется напряжение для синхронизации коммутатора Ki. Коммутатор Кг распределяет измерительные импульсы по соответствующим информационным каналам. Сигналы каждого из каналов де-модулируются, а затем записываются в многоканальном регистрирующем устройстве РУ. Если в РТС используется ФИМ, ШИМ или КИМ, то обычно в схему шифратора добавляется блок преобразования АИМ в требуемый вид модуляции. Этот блок устанавливается между коммутатором и передатчиком. В дешифраторе в этом случае используется блок обратного преобразования, включаемый между приемником и коммутатором Кг. Характерной особенностью многоканальных радиолиний с временным разделением каналов является передача сообщений в отдельные (дискретные) моменты времени. Однако соответствующим выбором продолжительности цикла передачи в зависимости от скорости изменения во времени телеметрируемых величин (см. т. 1, § 2-3, стр. 25) телеметрируемые величины можно передавать с достаточно высокой точностью. В зависимости от видов первичной и вторичной модуляции различают следующие основные типы радиотелеметрических систем с временным разделением каналов: АИМ-АМ, АИМ-ЧМ, ШИМ-АМ, ЩИМ-ЧМ, ФИМ-АМ, ФИМ-ЧМ, КИМ-AM и КИМ-ЧМ. Использование метода временного разделения каналов позволяет создать сравнительно простые по устройству, надежно работающие радиолинии с большим числом каналов. При этом взаимное влияние каналов оказывается менее существенным, чем при частотном разделении каналов. Коммутирующие устройства шифраторов и дешифраторов РТС с ВРК Важнейшими элементами РТС с ВРК являются коммутирующие устройства, используемые в шифраторе для поочередного подключения отдельных источников передаваемых сообщений к входу радиолинии, а в дешифраторе - для распределения принятых сигналов по соответствующим цепям (каналам). Коммутирующее устройство одновременно является сумматором и выполняет функцию канальных модуляторов, преобразуя выходные напряжения датчиков в последовательность видеоимпульсов, модулированных по амплитуде. Коммутирующие устройства РТС характеризуются следующими основными параметрами: числом опрашиваемых каналов (п); частотой опроса Е0пр; информативностью; погрешностью, вносимой коммутатором в измерения; параметрами входных и выходных сигналов, способностью работать в условиях изменяющейся внешней среды; сроком службы; весом; габаритами; потреблением энергии и т. п. Частота опроса каналов (частота подключения выходов канальных датчиков к входу радиолинии) в РТС зависит от наивысшей частоты спектра телеметрируемых величин (см. т. 1, § 2-3, стр. 95) и может выбираться в пределах от единиц до нескольких десятков тысяч герц. Информативность - это наиболее важный (обобщенный) параметр, равный произведению числа каналов на частоту опроса (иЕопр). Этот параметр определяет максимальное число измерений, которое может быть произведено посредством коммутатора в одну секунду. Величина погрешности, вносимой коммутатором в измерения, определяется собственными шумами коммутатора, величиной входного сигнала и другими причинами. В РТС применяются разнообразные по принципу .действия, конструкции и параметрам коммутирующие устройства. Все их можно разделить на две большие группы: механические (контактные) и электронные (неконтактные) коммутирующие устройства. Механические коммутирующие устройства (МКУ), представляющие собой распределители электромеханического типа, осуществляют поочередное подключение датчиков путем замыкания и размыкания электрических контактов. По конструкции и способу управления движением коммутирующего элемента контактные распределители делятся на шаговые, стартстопные и с непрерывным движением (распределители со скользящими контактами). Шаговые и стартстопные распределители (см. т. 3, § 23-3) в РТС применяются редко. Наиболее широко в РТС с ВРК используются механические коммутаторы со скользящими контактами. Такой коммутатор представляет собой контактную систему, состоящую из неподвижных ламелей fli, Пг, Пп, Пс (рис. 26-19, а) и скользящего по
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


