
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств 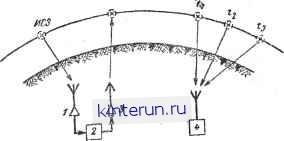 Рис. 25-175. Общая схема радионавигационной системы с использованием искусственных спутников Земли.
Рис. 25-176. Схема определения текущего значения расстояния до спутника. функции fnpM (t) в точке U при условии, что (ro/Wo)2 равна: Отсюда dfnpi, = ;-. (25-170) (25-171) Для нахождения w0 необходимо измерить частоту £Доп для нескольких (не менее двух) значений t и вычислить дао и го из (25-169) и (25-171). При определении местоположения корабля (самолета) по сигналам ИСЗ Рис. 25-177. Изменение частоты принимаемых сигналов ИСЗ во времени. 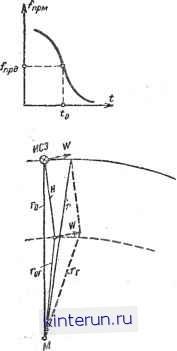 Рис. 25-178. Схема определения местоположения объекта по сигналам ИСЗ. решается обратная задача, т. е. находится минимальное расстояние от спутника до наблюдателя при известных координатах и параметрах движения спутника (рис. 25-178). По формуле (25-171) при известном значении скорости спутника Wo вычисляется расстояние г0. Затем определяется 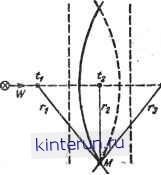 Рис. 25-179. Гиперболический метод определения положения объекта по сигналам ИСЗ. минимальная горизонтальная дальность гог = \ /д - Н2 , где И - высота спутника над Землей. Откладывая значение г0.г на перпендикуляре к проекции орбиты спутника на Земле, находим точку расположения наблюдателя (точка Af). Местоположение точки М можнЪ определить и другими способами, например подсчетом числа биений между принимаемым сигналом /прЫ и частотой местного гетеродина /г. Частота биений б - fr - /при - с dt где б - постоянная разность частот между передатчиком и местным гетеродином. Подсчет числа биений аналогичен интегрированию в определенном промежутке времени. . Приемнин Дешифратор Датчик времени Передатчик Передатчик Шифратор -6-4- Задающий генератор Приемник сигналов точного времени Рнс. 25-180. Функциональная схема оборудования ИСЗ.
Печатающее устройство ГетероВин Счетчик fg и блок поправки Смеситель Блок орбитальных ванных Вычислитель Координаты земли Датчик Времени Блок памяти Индикаторные устройства Приемник сигналов точного времени Рис. 25-181. Функциональная схема оборудования подвижного объекта при определении местоположения по сигналам ИСЗ. Число биений за период от ti до t% где A=(f2-h)6, ri и r2 - расстояния от наблюдателя до ИСЗ в моменты времени U и h. Таким образом, величина N6 определяет разность расстояний от двух известных точек до точки М. Поверхностью положения будет гиперболоид с фокусами в указанных двух точках. Определив разность расстояний в моменты t2 и Гз, можно получить второй гиперболоид. Следы двух гиперболоидов на плоскости, проходящей через точку М и точки расположения ИСЗ, образуют две пересекающиеся в точке М гиперболы (рис. 25-179). Если величина б неизвестна, то можно использовать измерения за три интервала времени н получить три гиперболы с известными фокусами, а затем подбирать значение б до тех пор, пока все гиперболы не пересекутся в одной точке земной поверхности. Временные интервалы Г[-f2 и --Гз составляют примерно 1-2 мин, поэтому при измерениях необходимо вносить поправки на собственное движение наблюдателя (точки М). Упрощенная функциональная схема оборудования ИСЗ (рис. 25-180). Параметры орбиты, определяемые наземными станциями, передаются на спутник 2 раза в сутки. Переключение оборудования ИСЗ для приема сигналов наземной станции производится с помощью переключателя прием - передача по программе. Для точного отсчета времени используется приемник сигналов точного времени. Сигналы наземных станций расшифровываются в дешифраторе, и параметры орбиты запоминаются в блоке памяти. Напряжения, соответствующие параметрам орбиты, поступают в шифратор, который модулирует высокочастотные колебания передатчика, работающего на частоте 200 Мгц). Второй передатчик, работающий на частоте /2(2= 100 Мгц), излучает немодулированные колебания. Сравнение двух сигналов ИСЗ с разными частотами в приемном устройстве наблюдателя позволяет практически исключить ошибку измерения fx, вызываемую ионосферной рефракцией радиоволн. Данные об орбите передаются со спутника с интервалом в 2 мин. Стабильность частоты передатчиков очень высока (изменение частоты за 15 мин не превышает 5-Ю 9 от среднего значения). Упрощенная функциональная схема оборудования подвижного объекта (рис. 25-181). В состав оборудования входят приемники сигналов спутника точного времени. Для выделения частоты биений сигналы спутника смешиваются с частотой местного гетеродина, относительный уход частоты которого за время прохождения спутника (15 мин) не должен превышать величины 10-9. Измерение частоты биений и введение поправки на влияние ионосферы производится в счетчике частоты fe и блоке поправки, с выхода которого истинная частота биений в виде двоичного кода поступает в ЦВМ. Сигналы, характеризующие параметры орбиты, выделяются в блоке орбитальных данных и также поступают в виде двоичного кода в ЦВМ. После обработки в ЦВМ число биений и данные орбиты фиксируются на ленте печатающего устройства в цифровом виде. На основе полученных данных с помощью вычислителя определяются координаты ИСЗ и затем местоположение объекта в земной системе координат. Окончательные результаты представляются на соответствующих индикаторах, например, в виде значений широты и долготы объекта или в виде светящейся точки на специальном планшете штурмана. Ошибка определения местоположения объекта зависит в основном от точности определения параметров орбиты и может не превышать 1 км. Учет несимметрии земного шара позволит уменьшить величину ошибки примерно в 2-3 раза, но потребует усложнения аппаратуры системы. При наличии на орбите четырех спутников средний интервал между определениями местонахождения составляет 110 мин. В промежуточных точках этого интервала должны использоваться другие навигационные системы (например, инерциальные системы счисления пути). Системы посадки и управления воздушным движением Системы посадки и управления с помощью соответствующих технических средств осуществляют: 1) привод летательных аппаратов в район посадки; 2) управление воздушным движением в районе посадки; 3) посадку и организацию движения по летному полю. Линия Плоскость плакирования планирования
ВПП,/\ гол /Ось ВПП х- планирования / Плоскость земли Рис. 25-182. Схема образования линии планирования. \ Средства привода должны обеспечивать непрерывное указание экипажу направления на аэродром и оставшегося расстояния до него с дальности порядка 250 км. Средства управления воздушным движением должны обеспечивать создание зон ожидания в районе посадки, управление движением отдельных летательных аппаратов с целью предупреждения столкновений, информацию экипажа об особенностях захода на посадку и выполнения посадки и т. п. Дальность действия средств управления должна быть порядка 150 км. Средства, позволяющие осуществить посадку, должны указывать экипажу (рис. 25-182) плоскость посадочного курса, плоскость планирования и расстояние до оптимальной точки приземления на взлетно-посадочной полосе (ВПП). Требуемая точность посадки достигается при ширине зоны курса, равной примерно 1° и зоны планирования - 0,5°. Указание величины отклонения летательного аппарата от плоскости посадочного курса должно производиться непрерывно до момента приземления, начиная с дальности 70-80 км, и от плоскости планирования - с дальности 25-30 км от начала ВПП. Положение лнниа планирования должно быть стабилизировано по вертикали и горизонтали с точностью ±0.,25 . Чувствительность аппаратуры должна обеспечивать индикацию смещения летательного аппарата от заданной линии планирования иа 0,25е влево или вправо и на 0,1° вверх или вниз. Средства организации движения по летному полю должны обеспечивать раздельное наблюдение самолетов на летном поле и передачу им указаний о направлениях и порядке движения.
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


