
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств где a(rv)-ошибка определения разности расстояний, ct и а2 - углы, под которыми из точки М видны базы устройств. На рис. 25-171 показаны контуры рабочих зон разностно-дальномерных радионавигационных систем, состоящих из четырех наземных станций при их различном размещении. Примером систем рассматриваемого типа может служить система, работающая в диапазоне 90-110 кгц [Л. 11]. База системы порядка 1000 км, длительность импульса около 200 мксек, часто- та посылок импульсов лежит в пределах 20-66 гц. Среднеквадратичная ошибка измерения составляет 0,2-0,3 мксек. Дальность действия над сушей 2240 км (при работе поверхностной волной). При использовании пространственной волны дальность может быть увеличена до 3500- Рис 4500 км, однако ошибки измерения возрастают до 2-5 мксек. Частотные методы измерения временных интервалов в разностно-дальномер- ных системах применения не находят. Угломерно-дальномерные системы Угломерно-дальномерные системы обеспечивают получение на борту летательного аппарата (корабля) информации о расстоянии до наземного радиомаяка системы, координаты которого известны, и о пеленге на маяк. Определение местоположения объекта производится, таким образом, относительно наземного маяка Система обеспечивает полеты по орбитам (при заданной дальности относительно маяка), по заданному маршруту, определение текущего местоположения и решение ряда других задач ближней навигации. В состав системы входит наземная и бортовая аппаратура, позволяющая как получать и обрабатывать необходимую информацию на борту, так и определять на земле координаты самолетов (кораблей), находящихся в зоне действия наземного маяка и имеющих оборудование этой системы. Упрощенная функциональная схема типовой угломерно-дальномерной системы приведена на рис. 25-172. Система работает в диапазоне УКВ. Определение дальности производится как на борту, так и на земле на основе измерения времени запаздывания ответных сигналов относительно запросных, которые при включенной аппаратуре излучаются наземным и бортовым передатчиками с частотой повторения, лежащей в пределах от нескольких десятков до нескольких сотен герц. Запросные импульсы, излучаемые бортовым передатчиком на частоте ft с кодом № 1, принимаются приемником наземного маяка и после дешифрирования на- правляются на запуск передатчика, излу чающего ответные импульсы с тем же кодом, но на частоте /г- Ответные импульсы, принимаемые бортовым приемником, дешифрируются и нап- 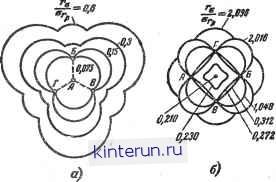 25-171. Рабочие зоны разностно-дальномерных систем равляются в канал измерения дальности, в котором начало отсчета определяется импульсом, поступающим от бортового пере датчика в момент излучения запросного импульса. Канал дальности включает систему автосопровождения по дальности, позволяющую с помощью указателя (например, типа механического счетчика) получить значения текущей дальности до маяка. Для движения по орбите в счетно-решающий прибор вводится заданное значение дальности (радиус орбиты), которое сравнивается с текущим значением. Напряжение, пропорциональное разности этих двух значений дальности, поступает на стрелочный прибор (типа нуль-индикатор). Нахождение стрелки на нулевом делении указывает экипажу на правильность движения по заданной орбите Запросные импульсы наземного передатчика излучаются на частоте f2 (как и ответные), но с кодом № 2, что позволяет в бортовом устройстве отличать их от ответных импульсов и после дешифрирования направлять на запуск бортового передатчика, а не в канал измерения дальности. Бортовой передатчик излучает ответные сигналы для наземной станции на частоте fi (как и запросные), но с кодом № 2, которые после дешифрирования в наземном приемном устройстве поступают в выходное устройство, например, типа ИКО. Запуск развертки дальности индикатора производится импульсом, совпадающим по времени с излучением запросного сигнала. Запросные сигналы посылаются наземным передатчиком через интервалы, определяемые временем поворота антенны азимутальных сигналов на заданный угол (порядка 1-3°), что осуществляется показанной на функциональной схеме связью между наземными передатчиками. г Бортевое оборудование Приемник Канал измерения азимута Счётно-решающий прибор Дешифратор Канал измерения дальности Указатель азимута Нуль индикатор \ Указатель дальности С5 1 I а > Передатчик запросных и ответных сигналов X XL Передатчики опорного и азимутального сигналов Передатчик запросных а omdemhbix си г нал од Дешифратор Индикатор Приемник Наземное оборудование Рис. 25-172. Функциональная схема углсмерно-далькомерной системы. С одним наземным маяком-ретранслятором при измерении дальности могут работать одновременно 50-100 бортовых устройств, что определяется пропускной способностью наземного запросчика-ответчика. Для определения пеленга самолета (корабля) наземным устройством системы применяется направленная антенна, угол поворота которой относительно опорного направления отмечается, например, на ИКО. Пеленг отсчитывается в этом случае по азимутальной шкале индикатора в соответствии с положением отметки ответных сигналов бортового передатчика. Для определения направления на маяк бортовым устройством системы наземное оборудование имеет в своем составе передатчики опорного и азимутального сигналов и две антенны: всенаправленную неподвижную и направленную вращающуюся (которая одновременно применяется для определения пеленга в наземном устройстве) . Опорный сигнал (рис. 25-173) излучается на частоте fs с помощью ненаправленной антенны в момент прохождения направленной антенной северного направления. Опорный сигнал, принимаемый бортовыми устройствами всех объектов, находящихся в зоне действия системы, направляется в канал измерения азимута и определяет начало его отсчета. Когда направленная антенна при дальнейшем вращении будет облучать определенный объект (самолет или корабль), его бортовое устройство примет азимутальный сигнал (также на частоте /3). Зная скорость вращения направленной антенны fiA (значение которой может передаваться в бортовое устройство путем посылки дополнительных сигналов) и измерив интервал времени между приходом опорного и азимутального сигналов, можно опре- делить угол ср или после пересчета на борту курсовой угол маяка -КУР (рис. 25-173). Текущее значение азимута может указываться с помощью стрелочного прибора. Для осуществления полетов с заданными значениями пеленга счетно-решающий прибор производит сравнение заданного и Шиеит посылки С опорного сигнала С  Рис, 25-173. Схема определения пеленга в угломерно-дальномерной системе. 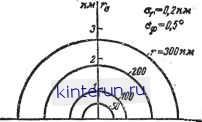 Рис. 25-174. Рабочие зоны угломерно-дальномерной системы. текущего значений пеленга и выдает на нуль-иидикатор напряжение, пропорциональное их разности. Ошибка определения местоположения для угломерно-дальномерных систем имеет следующее выражение: rQ = -]f о2 (г) + [ то (ф)]2 , (25-167) где га - радиус среднеквадратичного круга рассеяния; о(г) -среднеквадратичная ошибка измерения дальности; о(ф)-среднеквадратичная ошибка измерения азимута (в радианах); г - дальность до маяка. Дальность действия системы зависит от . высоты полета. Среднеквадратичные ошибки определе- ,ния направления и дальности для типовой системы составляют соответственно о(ф) ~ 0,5°; о (г) 200 м. Рабочие зоны системы, построенные для указанных значений ошибок в соответствии с выражением (25-167), приведены на рис. 25-174. Радионавигационные системы с использованием искусственных спутников Земли * Радионавигационная система с использованием искусственных спутников Земли (ИСЗ) состоит из спутников, наземных средств и бортового оборудования и служит для определения местонахождения кораблей или самолетов в любой точке земного шара независимо от метеоусловий, времени суток и года. Общая схема системы приведена на рис. 25-175. Передающее устройство спутника периодически излучает сигналы, содержащие информацию о параметрах его орбиты. Наземная станция слежения / принимает сигналы передатчика ИСЗ, на основе которых координационно-вычислительный центр 2 вычисляет истинные параметры орбиты спутника. Эти параметры с помощью станции передачи данных орбиты 3 через определенные интервалы времени передаются на спутник (в блок памяти). Сигналы спутника принимаются также бортовым устройством 4, установленным на корабле или самолете, и используются для определения их местоположения относительно ИСЗ. Параметры стационарной орбиты ИСЗ могут быть определены путем измерения одной навигационной величины в течение некоторого интервала времени из одного наземного пункта с последующей специальной обработкой результатов измерений. Можно, например, измерить допплеровский сдвиг частоты (Едоп) сигналов передатчика ИСЗ, принимаемых в точке наблюдения М (рис. 25-176). При известном значении Fдои можно вычислить наименьшее расстояние го от наблюдателя до спутника и скорость спутника Доо в момент его прохождения на расстоянии -0. При известных значениях гл и ад могут быть определены все параметры орбиты [Л. 12]. Если приближенно принять движение спутника в точке максимального сближения А равномерным и прямолинейным (рис. 25-176), то текущее значение расстояния до спутника (в точке Б) будет: Г=УГ гц+г)2 , (25-168) а допплеровское смещение частоты принимаемых сигналов 1 dr 1 w4 (25-169) Изменение частоты принимаемых сигналов во времени показано на рис. 25-177. В момент to. соответствующий расстоянию Го, величина Едоп-0 и fnpm=fnPfl. Крутизна 8 Параграф напнсаи по. зарубежным источникам.
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


