
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств i I I м i 1 I I i {м I м м I !. I I I 1 i и I I I I 1.1 I I I I I 1г 1 Рис. 25-120. Вид напряжений в характерных точках схемы рис. 25-119 (т=2ч СЛ. Экран со щелью 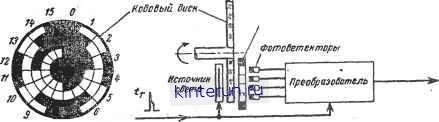 В блок памяти ЦВМ в ? Импульс цели Рис. 25-121. Устройство преобразователя угловых координат. йтульс цели Чонтаыпрт / енератор Хзяяяовных амйульсоб Схема вычитание Схема совпадения
счетчику импульсов * Считывание Рис. 25-122. Преобразователь постоянного напря* жения. иого сектора диска к другому. По одну сторону диска располагают щелевой импульсный источник света, по другую- фотодетекторы в количестве, равном числу зарядов счетчика. Считывание кода происходит при подаче на источник света импульса цели из преселектора. Так, при нахождении перед щелью сектора 6 диска в момент прихода импульса цели фотодетекторы выдадут код 0101, что соответствует числу 6 или в двоичном коде ОНО. Так как в ЦВМ следует подавать информацию в двоичном коде, то сигналы фотодетекторов преобразуются в двоичный код в специальном преобразователе. Преобразователь постоянного напряжения (рис. 25-122). В некоторых случаях, когда измерение угловой координаты не связано с вращением антенны, а вычисляется по соотношению ин-тенсивностей сигналов, принятых различными каналами, выходные данные выдаются в виде непрерывного напряжения. Для использования этих данных в ЦВМ их надо перевести в двоичный код. На рис. 25-122 показана схема устройства, выполняющая эту задачу путем преобразования напряжения в пропорциональные временные интер- валы, которые в свою очередь преобразуются в двоичный код путем счета эталонных импульсов, укладывающихся в интервале Импульс цели / с выхода преселектора одновременно запускает два фантастрона. Один из них вырабатывает импульс 2 постоянной длительности т0, являющийся импульсом минимально возможной длительности для обоих генераторов. Второй генератор под действием измеряемого напряжения fH3M вырабатывает импульс 3 длительностью То+йиэм- Оба импульса подаются иа схему вычитания, выделяющую импульс 4 разностной длительности Тизм-йизм. Этот импульс открывает схему совпадений и пропускает на счетчик эталонные импульсы (5, 6), вырабатываемые генератором импульсов. Число эталонных импульсов, прошедших на счетчик, пропорционально измеряемому напряжению: N = ЕТизм = FkiUnSM - = -*2с/изм. (25-140) Считывание показаний счетчика осуществляется при подаче на схемы совпадений импульса 7, являющегося результатом дифференцирования среза измеряемого импульса. Для того чтобы измерение могло проводиться при любом знаке входного напряжения, на входе устройства необходимо предусмотреть две цепи: одну для напряжения положительного знака, а вторую - для отрицательного с последующим инвертированием. Знак измеряемого напряжения может быть подан в ЦВМ через схему совпадений, управляемую напряжением инвертора. Преобразование значения радиальной скорости цели в двоичный код осуществляется путем измерения частоты Допплера за определенный интервал времени. Напряжение частоты Допплера подается на счетчик биений через вентиль совпадений, открываемый иа фиксированное время измерения -Гиэм. Значение радиальной скорости связано с подсчитанным количеством импульсов N формулой: Vp = -rr-£-N = const N. (25-141) . Влияние устройств сопряжения на различимость сигналов, точность и разрешающую способность,- В принципе устройство сопряжения может осуществлять накопление сигналов как идеальный интегратор, не имеющий потерь иа насыщение и спадание уровня сигнала в промежутках между импульсами. Однако при реализации этих потенциальных возможностей схема преселектора получается весьма сложной. Наиболее часто применяемый метод двоичного (бинарного) интегрирования, дает, как уже указывалось, отношение сигнал/шум на выходе, примерно на 2 дб меньше получаемого при непрерывном оптимальном интегрировании. Но даже и в таком простейшем варианте выходное устройство сопряжения РЛС с ЦВМ оказывается значительно сложнее индикатора, и его применение оправдано лишь в тех случаях, когда требуется такая большая скорость обработки информации о целях, которую оператор ие может обеспечить. Разрешающая способность устройства сопряжения определяется: при разрешении по дальности и угловым координатам- ценой интервала эталонных импульсов; при разрешении по скорости - разрешающей способностью счетчика биений. Потенциальная разрешающая способность по времени будет реализована в тех случаях, когда период эталонных импульсов не превышает длительности зондирующего сигнала, а при разрешении по угловым координатам - когда угол поворота антенны за период эталонных импульсов не превышает ширины диаграммы направленности. Ошибки измерения, вносимые устройством инструментального съема данных, возникают в основном из-за нестабильности частоты следования эталонных импульсов и из-за дискретности отсчета. Применительно к измерению дальности среднеквадратичная ошибка из-за дискретности отсчета равна: о (г)дискр = -~=т (25-142) 2V 3 о Мднскр = -~= я; 0Д5 сТ9Т, (25-143) 4К 3 так как , Ошибка из-за дискретности при отсчете временного интервала может быть уменьшена применением нониусных схем счета импульсов (до значений в десяток наносе- кунд). Ошибка из-за нестабильности частоты эталонных импульсов равна: о(г)нст = г>, (25-144) эт где a(Fsr)IF3T - относительное среднеквадратичное отклонение частоты, г>-измеряемая дальность. Если частота генератора эталонных импульсов стабилизирована кварцем, то можно принять, что £<> ,o-io-5 и тогда 0(г) ст = (10-*-f- 10-5)>. (25-145) Аналогично могут быть определены и ошибки в измерении угловых координат. В заключение следует пояснить, как осуществляется запоминание радиолокационной обстановки за период обзора и ее последующий анализ при сопряжении РЛС с ЦВМ. В отличие от индикаторов с яркостной отметкой, где обстановка в зоне обзора запоминается иа экране за счет его послесвечения, в устройствах сопряжения РЛС с ЦВМ такое запоминание ие осуществляется. Эта задача решается в самой машине благодаря вторичной обработке сигналов [Л.4]. Сигналы целей и шумы, прошедшие через преобразователь в течение всего периода обзора, записываются в ячей-ках памяти ЦВМ. Суть вторичной обработки заключается в вычислении вероятностного положения цели и области ее возможных отклонений в последующие циклы обзора по данным предыдущего наблюдения, и сравнении результатов вычисления с полученными данными. Эти вычисления ЦВМ ведет как для сигналов цели, так и для шумовых выбросов. Вероятность попадания шумовых выбросов в рассчитанную область в следующем цикле обзора очень мала. Наоборот, сигналы цели, движущиеся относительно закономерно, всегда попадают в рассчитанную для них область. На основании этих различий метод ЦВМ отсеивает ложные цели, скорости идентифицирует новые сигна- I: вращения лы, попадающие в расчетную область, с целями, записанными ранее в памяти. Чем больше память ЦВМ, тем больше сигналов (действительных и ложных) может быть в ней за- , писано и идентифицировано. Следовательно, при ограниченном количестве действительных целей тем больше шумов может быть подано на вход машины и в последующем отсеяно, тем ниже может быть порог обнаружения РЛС и тем больше будет дальность обнаружения при заданной вероятности правильного обнаружения. Однако следует иметь в виду, что это достигается за счет большого усложнения ЦВМ. Трансляция радиолокационной и радионавигационной информации . Трансляция информации бывает необходима при размещении РЛС и РНС вдали от пунктов сбора информации. Примерами могут служить системы дальнего обнаружения ракет, системы обнаружения и наведения ПВО, системы управления движением самолетов и кораблей в районе аэродромов и портов. В некоторых случаях может бытьнеобходима трансляция изображения земной поверхности с борта самолета-разведчика или воздушной обстановки с борта самолета радиолокационного обзора. Системы трансляции (рис. 25-123) можно разделить иа два типа: 1) с передачей всех сигналов, формирующих изображение на экране индикатора, без их предварительного преобразования; 2) с передачей предварительно преобразованных (проинтегрированных) сигналов целей. Системы первого типа требуют для своего осуществления широкой полосы ча- стот, равной ширине спектра сигнала Д/Сп = ~ 1/тс, где тс - длительность сигналов. Это определяет сложность технической реализации трансляционной линии. В принципе для передачи информации, переносимой сигналами, требуется значительно меньшая полоса частот. Общее число элементов разложения изображения, которое необходимо передавать, равно числу элементов разрешения, отображаемых на индикаторе. Например.для РЛС кругового Системы трансляции Системы с непосредственной трансляцией p/jr Сигналов Системы с преддарительнь/м преобразованием р/л сигналов Телевизионной система Система с накопительной трубной Цифровой метод Рнс. 25-123. Схема классификации систем трансляции. обзора это число равно: 36.0° 6(г) 6 (<раз) (25-146) Наивысшая частота сигнала транслируемого изображения, которая может иметь место, равна: 2Т0бз (25-147) где Т0бз- период обзора. Принимая 6 (г) ка 6 (г)ВОТ я Гы~ 2 б(фаэ) б(фаз)пот СТи 2 и подставляя эти значения в (25-147), учетом (25-146) получаем: Ти 360° 1 /макс - о от ти °а 1 обз Учитывая, что А. 360° Т0бз - Тобл
|
|||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


