
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств 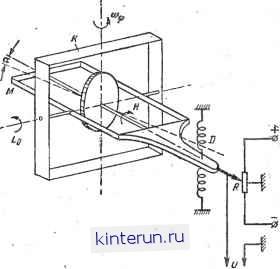 Рис. 25-83. Схема гиротахометра, используемого для измерения угловой скорости цели. там) На антенне устанавливают гироскопический прибор - гнротахометр (рис. 25-83), с помощью которого измеряется угловая скорость поворота антенны, равная скоро-рости линии визирования цели. Внешняя рамка карданова подвеса К крепится к платформе поворачивающейся антенны, угловую скорость которой (сСф) нужно измерить. При повороте рамки К на внутреннюю рамку М гироскопа будет действовать гироскопический момент Ед, определяемый векторным произведением кинетического момента гироскопа Н и угловой скорости (йф: LR=[Ha ф]. Под действием момента Ад внутренняя рамка М будет поворачиваться до тех пор, пока гироскопический момент не уравновесится моментом упругой реакции пружины D, концы которой закреплены на платформе антенны. Угол поворота рамки от ее среднего положения а при равновесии окажется пропорциональным угловой скорости соф: а=Шф. Перемещение рамки передается на потенциометрический датчик R, с которого снимается напряжение U, позволяющее определить угловую скорость <Вф и по знаку и по величине: с/=й2о)ф, полярность U определяет знак сйф. Угловая скорость цели может быть определена также с помощью двух РЛС, измеряющих допплеровский частотный сдвиг отраженных от цели сигналов. Пусть в точках Oi и 02, расположенных на расстоянии d, помещены антенны двух измерителей допплеровской частоты сигнала (рис. 25-84). Если d очень мало по сравнению с расстоянием между РЛС и целью (d:£J =$г/1000), то направления прихода волн в обе точки можно считать одинаковыми. Фазовый сдвиг колебаний в точках Oi и 02 будет зависеть от разности хода волны до этих точек: 2п <rt - г ) 2nd Дф = --\-- = - sin ф. (25-108) Продифференцировав обе части равенства по времени, получим: drt dr2 ~dl~ dt Так как drx dt ~ - -- == d - cos ф dt Y РдогИ. dr2 2 dt доп2 *P ф 2d cos ф Для ф<10° совфя;1 Я. (onl-ons)- (25-109) -(FAoni-Vns)- (25-110) Таким образом, измерение разности доппле-ровских частот сигнала в двух близко расположенных уточках пространства позволяет определить угловую скорость цели относительно этих точек. Измеритель Измеритель  Рис. 25-84. Схема системы, позволяющей определять угловую скорость целей путем измерения доп-плеровеких частот в двух точках. Зная сйф, по (25-106), можно вычислить тангенциальную составляющую скорости цели и по 25-105) - полную скорость. Расчетные методы определения высоты Один из распространенных методов определения высоты целей основан на измерении их дальности г и угла места фу.м и вычислении высоты по формуле # = гзшфу.м. (25-111) Если учитывать кривизну земли, то формула должна быть уточнена Н = г sin фу.м + (25-112) где Re- эквивалентный радиус Земли с учетом рефракции радиоволн (э-ВбОО км).  Рис. 25-85. К измерению высоты V-образной диаграммой. В радиолокации для определения высоты целей используют- также РЛС с двумя, плоскими диаграммами направленности, одна из которых расположена вертикально, а вторая - наклонно, под углом у к первой (РЛС с V-образной диаграммой). Обе диаграммы вращаются с постоянной скоростью вокруг вертикальной оси ОО. Сначала цель попадает в вертикальную диаграмму направленности (рис. 25-85, а), а затем при повороте на угол Дф - в наклонную (рис. 25-85, б). Высота цели может быть определена через дальность и угол поворота антенны РЛС (Дф) междупопаданиям и цели в вертикальную и наклонную диаграммы: ГвшДф Н=- -. (25-113) ]/~tg2 у + sin2 Дф Если учитывать кривизну Земли, то г sin Дф г2 Vig*y + зшаДф 2/?э (25-114) 25-7. МЕТОДЫ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ В РАДИОЛОКАЦИОННЫХ И РАДИОНАВИГАЦИОННЫХ СИСТЕМАХ Информация, содержащаяся в выходных сигналах радиолокационных и радионавигационных приемников, . должна быть в дальнейшем преобразована в соответствии с характером ее последующего использования. Это преобразование производится выходным устро й.с т в о м. Выходное устройство РЛС или РНС представляет собой специфический узел аппаратуры, выполняющий весьма важные функции в процессе обнаружения и разрешения сигналов, измерения их параметров (или, что то же, координат и скорости источников сигналов) и отображения взаимного пространственного положения источников сигналов в зоне обзора РЛС (РНС). По характеру отображения информации выходные устройства можно разделить на три основных вида: индикаторные, автоматические непрерывного действия и автоматические дискретного действия. Индикаторные устройства применяют во всех случаях, когда получателем информации является непосредственно человек - оператор РЛС (РНС). Индикаторные устройства преобразуют выходные электрические сигналы приемника в сигналы, воздействующие на зрение или слух оператора (например, электроннолучевые индикаторы). Автоматические выходные устройства непрерывного действия применяются в тех случаях, когда информация должна быть передана в аналоговую вычислительную машину. Такими устройствами являются автоматические дальномеры и системы слежения по угловым координатам, например, в РЛС управления оружием. В этом случае производится автоматическое непрерывное измерение координат одной цели. Результаты измерений в виде пропорциональных напряжений поступают из выходного устройства в вычислитель оружия для выработки прицельных данных. Можно говорить, что при этом также происходит отображение информации, но не в форме, воздействующей на органы чувств человека, а в виде электрических напряжений определенной величины. Автоматические в ых о д н ы е устройства дискретного действия служат для сопряжения РЛС (РНС) с цифровыми вычислительными машинами (ЦВМ). Эти устройства преобразуют информацию, содержащуюся в выходных сигналах приемников, в код (обычно двоичный), в котором должны вводиться в ЦВМ входные величины. Закодированная информация записывается в ячейках памяти машины. Таким образом, можно говорить об отображении информации, осуществляемом в устройстве памяти ЦВМ, и, строго говоря, к выходному устройству должно быть отнесено и устройство памяти. Объем информации, который должен быть отображен в выходном устройстве, определяется потенциальной информативностью РЛС (РНС). Если РЛС анализирует зону обзора в виде пространственного сектора с размерами гм - по дальности, Фаз - по азимуту и Фу.м - по углу места н имеет соответственно потенциальные разрешающие способности 6(Гм)пот, б (фу.м) п0т, 6(фаз)пот, то общий объем информации, который может быть получен в идеальном случае, определяется отношением гм Фаз Фу.м б(г)пот 6 (Фаз)пот 6 (фу.м)пот Если РЛС (РНС) имеет разрешение и по скорости, то добавится еще сомножитель 1/макс/6(У)пот. Выходное устройство, в этом случае должно отобразить обстановку (координаты и скорости целей) в трех-или четырехмерном пространстве. Как правило, при этом вносятся ухудшения (потери), снижающие потенциальные возможности РЛС (РНС) по дальности обнаружения, разрешающей способности и точности измерений координат (см. т. 1, разд. 3). Выходные устройства, как правило, являются частью схемы обработки, обеспечивающей наилучшее обнаружение сигналов на фоне шумов. В большинстве случаев принимаемые сигналы имеют вид конечной последовательности некогерентных импульсов- пачки . Число импульсов в пачке определяется временем облучения цели и частотой посылок и выбирается из энергетических соображений. Оптимальная схема обработки такого сигнала технически наиболее легко реализуется в виде фильтра, согласованного по амплитудно-частотной характеристике. с амплитудным спектром одиночного импульса, детектора огибающей, последетекторного интегратора, накапливающего энергию отдельных импульсов пачки вместе с шумом, и порогового устройства, позволяющего принять решение о наличии или отсутствии сигнала. Накопление энергии отдельных импульсов и испытание суммарного напряжения на порог выполняет чаще всего выходное устройство. В индикаторных выходных устройствах накопление осуществляется либо в самом индикаторе (например, за счет накопления яркости свечения экрана), либо в глазу и мышлении оператора, который осуществляет также функции порогового устройства. В автоматических выходных* устройствах применяются различные накопительные схемы, основанные на применении интегрирующих конденсаторов, мишеней накопительных трубок, устройств магнитной записи и т. д. Пороговые устройства выполняются в виде инструментальных схем (например, усилитель с регулируемым смещением, и т. д.), а в индикаторных устройствах их дополняет и оператор, органы чувств которого также имеют свой пороговый уровень. При накоплении энергии в выходных устройствах возникают потери, вызываемые различными факторами (например, неиде-альиостью интегрирования и т. д.). Таким образом, любое реальное выходное устройство всегда ухудшает потенциальные возможности обнаружения сигналов, которые имеет схема оптимальной обработки (иными словами, снижает дальность действия РЛС) при заданной надежности обнаружения. Ухудшение разрешающей способности, вносимое выходным устройством, вызывается увеличением размеров элемента разрешения (например, рисующего пятиа в электроннолучевом индикаторе) по сравнению с потенциальным случаем. Для измерения координат и скорости любое выходное устройство имеет отсчет-ное устройство того или иного вида, которое позволяет реализовать метод оценки параметра по максимуму выходного напряжения. При определении положения максимума вносятся дополнительные ошибки, зависящие от типа отсчетного устройства. Наименьшими ошибками обладают системы автоматического измерения непрерывного действия. Так, например, стробы дальномера, следящего за импульсом цели, определяют положение максимума сигнала с очень малой ошибкой, и точность измерения в этом случае будет близка к потенциальной. Наоборот, оператор, определяющий положение центра отметки цели по шкале с мелким масштабом и большой ценой от-счётных делений, совершает большую ошибку при интерполяции, и общая ошибка измерения может быть значительно больше потенциальной. Информация, получаемая от РЛС (РНС), может не только использоваться непосредственно в месте приема и во время ее получения, но также передаваться в различные пункты, запоминаться (записываться) и храниться до момента ее использования и обработки. Для передачи информации от РЛС на различные ч командные пункты, пункты наблюдения и обработки данных, вычислительные центры и т. д. служат системы передачи (трансляции) данных, которые осуществляют дистанционную передачу и последующее воспроизведение информации в нужном месте и виде. При различных научных исследованиях в космосе и на Земле иногда бывает необходимо записывать (запоминать) поступающую информацию. Это позволяют сделать системы записи (см. т. 2, разд. 16). Запись производится на магнитной ленте, фотопленке, термопластической пленке и некоторыми другими способами Отображение информации с помощью индикаторных выходных устройств Существует большое многообразие индикаторных выходных устройств (рис. 25-86). По назначению их разделяют на
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


