
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств 1) увеличение дальности обнаружения своих объектов; 2) измерение расстояния дб обнаруженных целей и их скорости; 3) опознавание (определение государственной принадлежности) целей; 4) передача данных, характеризующих наблюдаемые объекты (например, данных о высоте полета самолета); 5) индивидуальное распознавание объектов наблюдения; 6) повышение Обобщенная функциональная схема автономного запросчика (рис. 25-73). Задающим элементом является синхронизатор, формирующий запускающие импульсы напряжения. Эти импульсы воздействуют на схему формирования кода канала запроса. Кодирование при запросе позволяет отсеять многие помехи; кроме того, кодированный запрос облегчает отбор нужной информации. Синхронизатор Схема пода запроса ЛереВвтчш Выходив устройства
Антенна Приемник Рис. 25-73. Схема автономного аапросчнка. Ввод данных запроса Схема кода отдета Приемник Схема АРУ Передатчик Схема запирания Антенна Рис. 25-74. Схема ответчика. помехозащищенности системы против воздействия естественных и искусственных помех. Системы с активным ответом находят применение и & радиолокации (для повышения дальности обнаружения малоразмерных целей и опознавания), и в радионавигации-в системах управления воздушным движением самолетов, системах измерения дальности целей и т. д. Для радиолокационной аппаратуры с активным ответом выделены волны длиной приблизительно 30 см; в радионавигационных устройствах используются волны метрового диапазона. Как правило, применяется импульсный режим работы радиотехнических устройств. Роль запросчиков могут играть РЛС обнаружения и наблюдения за целями; в дальномерных навигационных системах, а также в системах опознавания в качестве запросчиков применяют специальные радиотехнические устройства. Например, в американской системе управления воздушным движением (УВД) один код запроса используется для взаимодействия с военными самолетами, а второй - с гражданскими. Кодирование, как правило, производится по числу импульсов в коде (2 и 3) и временному интервалу между ними (от нескольких микросекунд до нескольких десятков микросекунд). Импульсы кодирующего устройства воздействуют на передатчик, от которого высокочастотные импульсные сигналы поступают в антенну. Принятые импульсные сигналы ответчика подводятся к приемнику. От приемника видеоимпульсы поступают к дешифратору, где осуществляется декодирование и выдаются сигналы для выходного устройства. В качестве выходного устройства чаще всего используют потен-циалоскопы с видимым изображением, в частности с буквениоцифровой индикацией. Для того чтобы избавиться в приемнике запросчика от сигналов, представля- ющих собой отражение от гидрометеоров, местных предметов и Земли, ответ производится иа частоте, отличной от частоты запроса. Рис. 25-75. Диаграммы направленности антенн в системе компенсации. Обобщенная функциональная схема ответчика (рис. 25-74). Принятые сигналы запроса поступают в приемник; его выходные видеоимпульсы воздействуют на дешифратор запроса, пропускающий лишь правильно закодированные сигналы запроса. Эти чик; заперев же приемник на некоторое время после излучения, мы исключаем это явление. Во-вторых, ограничение частоты ответных сигналов может осуществляться путем уменьшения чувствительности приемника при увеличении количества запрашивающих сигналов в единицу времени. На рис. 25-74 показана схема АРУ приемника, на которую воздействуют импульсы модулятора передатчика. При увеличении частоты запрашивающих сигналов иа выходе схемы АРУ возрастает управляющее напряжение и усиление приемника падает. Это приведет к тому, что более удаленные запросчики ие смогут возбудить ответчик и количество запрашивающих сигналов снизится. Серьезной проблемой при использовании активной радиолокации является мешающее действие боковых лепестков диаграммы направленности антенны запросчика. Их наличие сказывается двояким образом: Синхронизатор Коммутаций Модулятор Рис. 25-76. Схема компенсации боковых лепестков антенны. Основная антенна Вспомогательная антенна сигналы запускают схему кода ответных сигналов, формирующую импульсы напряжения, которые управляют работой передатчика ответчика. В кодирующее устройство от специальных датчиков может вводиться дополнительная информация, которую нужно передать с помощью ответных сигналов. От передатчика сигналы поступают к антенне и излучаются. Антенна ответчика должна быть по возможности ненаправленной, чтобы был обеспечен прием сигналов запроса с любого направления. Передатчик ответчика характеризуется определенной средней мощностью излучения. Для того чтобы эта средняя мощность не была превышена (иначе ответчик может выйти из строя), автоматически ограничивают максимальную частоту срабатывания передатчика. Достигается это двумя путями. Во-первых, применяют запирание приемника ответчика после каждого излученного сигнала. На рис. 25-74 .показана схема запирания, которую запускают импульсы передатчика. Длительность запирающих приемник импульсов составляет приблизительно 20-40 мксек. Запирание приемника является наиболее эффективной мерой борьбы с помехами при использовании одинаковой частоты для запроса и ответа: при ответе излученные сигналы, отражаясь от Земли или от близлежащих местных предметов, могут снова возбуждать ответ- во-первых, возможен запрос ответчиков не только по основному лепестку, но и по боковым; во-вторых, возможен прием ответных сигналов по боковым лепесткам. В результате возникают ошибки пеленга целей и увеличивается загрузка ответчиков (каждый запросчик заставляет срабатывать ответчики в более широком секторе). Борьба с влиянием боковых лепестков при приеме сигналов в запросчике осуществляется главным образом методом вычитания сигналов вспомогательного канала из сигналов основного канала (см. § 25-3). Эффективный путь борьбы с боковыми лепестками при запросе состоит также в использовании двух передающих антенн (см. рис. 25-75) - основной направленного действия / и вспомогательной ненаправленной 2; питаются они от одного передатчика через быстрокоммутируемый антенный переключатель (рис. 25-76). Запросный кодированный сигнал состоит, например, из двух импульсов (U\, Uz), разделенных интервалом то (рис. 25-77). Эти импульсы излучаются через основную антенну, и поэтому амплитуда на входе приемника ответчика зависит от ориентации антенны в пространстве. Между кодовыми импульсами через ненаправленную антенну излучается контрольный импульс, амплитуда которого UK не зависит от направления на цель. В дешифраторе ответчика первый кодовый импульс (Ui) и контрольный (Уи) сравниваются по амплитуде. Если Ui>Uk, что соответствует запросу ответчика по основному лепестку диаграммы направленности антенны запросчика, то дешифратор пропускает кодированный сигнал и далее излучается ответный сигнал. Если же Ui<UK, что соответствует запросу по Ответ если. 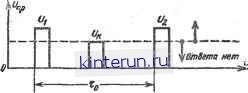 Рис. 25-77. Импульсы кодированного запросного сигнала. боковому лепестку, то дешифратор ответчика запирается на время, несколько большее То, и сигнал запроса не проходит. Дальность действия систем с активным ответом определяется раздельно для канала запроса и канала ответа [см. формулу (25-2)]. Особенности измерения дальности При дальномегрии с использованием ответчиков или ретрансляторов измеряется время запаздывания радиоволн при их распространении от запросчика к ответчику и обратно. Здесь следует учитывать два дополнительных обстоятельства. Во-первых, в ответчике сигнал претерпевает длительную постоянную задержку tj, связанную с дешифрированием сигналов запроса и выработкой управляющих кодирующих импульсов напряжения. Кроме того, имеет место постоянная задержка т2 при анализе ответного сигнала в. запросчике. Следовательно при измерении в запросчике времени запаздывания ответного сигнала нужно учитывать постоянный сдвиг Тг+тг, зависящий от используемых в данный момент кодов. Во-вторых, образующаяся задержка имеет случайную составляющую, которая определяет случайную ошибку измерений. Весьма ориентировочно можно считать, что среднеквадратичное значение ошибки измерения времени запаздывания составляет 0,1-0.2 мксек, что соответствует ошибке по дальности 15-30 м. Импульсные дальномерные устройства при использовании активного ответа могут быть неавтоматическими, полуавтоматическими и автоматическими. В неавтоматических устройствах измерение осуществляется оператором с помощью индикаторного устройства того или иного типа. Полуавтоматические устройства отличаются тем, что в них оператор производит поиск сигналов по дальности, а их сопровождение после захвата и выдача данных автоматизированы. Автоматические устройства содержат систему по- иска сигналов по дальности и систему автосопровождения. Точность и помехозащищенность автоматических и полуавтоматических дальномеров существенно возрастают при использовании временного стробироеания приемника запросчика, заключающегося в том, что обычно запертый приемник отпирается специальными короткими импульсами только на время прихода полезных сигналов (временное положение сигналов известно после их обнаружения). Возможности передачи дополнительной информации Кодируя ответные сигналы в системах с активным ответом, можно передавать дополнительную информацию о целях. Указание о требуемой информации содержится в сигнале запросчика. Так, например, в применяемой в странах НАТО системе сигналы .запросчика содержат тройной код. Одна кодовая группа предназначена для отпирания ответчика, вторая - используется для индивидуального опознавания самолета, а третья - для передачи данных о высоте самолёта. В ответном сигнале могут содержаться данные о государственной принадлежности цели, например самолета - его индивидуальный код, данные о высоте полета, а также дополнительные важные сообщения; имеются коды, с помощью которых передают заранее обусловленные сообщения, например, о наличии аварийной ситуации или о потере радиосвязи и т. д. Индивидуальное опознавание в иностранных системах осуществляется путем передачи бортового номера самолета; в ответчике предусматривается специальное приспособление для ввода этого номера в кодирующее устройство. Данные о высоте полета в аналоговом виде выдает барометрический высотомер (например, в виде угла поворота вала). Датчик вал - код позволяет преобразовать угол поворота в двоичный код. Полный ответный сигнал представляет собой последовательность импульсов (рис. 25-78), в которой импульсы а, и % занимают вполне определенное взаимное положение, будучи разделены заданным интервалом Tj. Группа импульсов б предназначается-для передачи бортового номера самолета путем использования возможных комбинаций этих импульсов; группа е позволяет сообщить о высоте полета, а положение импульса г относительно а2 (временной интервал т2) определяет код опознавания (государственной принадлежности). Число кодов, которые могут быть получены различными сочетаниями импульсов на позициях от 1 до п, равно (2п-1). В настоящее время в иностранных системах п=6 (см. рис. 25-78 - группы бив), и при этом можно получить 63 кодовые комбинации. Увеличение возможных позиций до 12 позволяет увеличить число кодовых комбинаций до 4 095.
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


