
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств Двигателе угле место Прие и* £бигап*рль сканиробоиия Фазодьш детектор угла места
Рис 25-56. Схема системы автосопровождения по угловым коорди* натам при использовании конического сканирования. 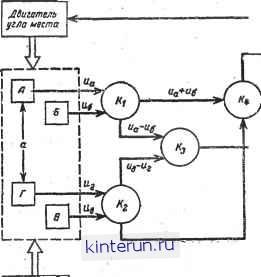 Усилитель-* раничитель Фазовый детектор угле места
Усилитель ограшчитель Фазовый, детектор азимута  ДВигатель азимута Рис. 25-57. Схема фазовой суммарно-разностной системы автосопровождения по угловым координатам. фазе на 90°. Опорное напряжение канала угла места достигает максимума в те моменты, когда диаграмма направленности находится в верхнем и нижнем положениях; его начальная фаза принимается равной нулю Иу.м = £/0п COS Qat, а опорное напряжение канала азимута максимально при крайнем правом и крайнем левом положениях диаграммы направленности, т. е. Иаэ = f on Sin Oaf- Для того чтобы система начала работать, необходимо повернуть антенну таким образом, чтобы цель оказалась в пределах конуса сканирования. Амплитудная суммарно-разностная моноимпульсная система автосопровождения (см. рнс. 25-41). Прн автосопровожденни по угловым координатам выходные напря-. ження приемников, угла места и азимута подводятся не к измерителям, а используются для управления двигателями, поворачивающими антенну по углу места н азимуту. В момент совмещения равносигнального направления антенны с направлением на цель выходные напряжения становятся равными нулю и перемещение антенны прекращается. Фазовая суммарно-разностная моноим-пульсиая система автосопровождения (рис. 25-57). Устройство имеет четыре приемные антенны; в отличие от амплитудной системы центры антенны разнесены (аХ), а диаграммы направленности антенн в пространстве совпадают. От антенн сигналы подводятся к кольцевым мостам, где осуществляется суммирование и-вычитание высокочастотных колебаний. В отлнчне от амплитудной в фазовой системе вводится сдвиг по фазе опорного суммарного напряжения на 90°. От фазовых детекторов напряжения £/у.м и t/аз, пропорциональные угловому рассогласованию равнофазного направления антенны и направления на цель, поступают к двигателям, осуществляющим поворот антенного устройства. При нахождении цели на равнофазном направлении напряжения 1УУ.М н £/аз становятся равными нулю н движение антенны прекращается. Потенциальная составляющая разрешающей способности при автоматическом сопровождении равна приблизительно удвоенной ширине луча радиотехнического устройства, при использовании амплитудных и амплитудно-фазовых методов, и ширине луча при использовании фазового метода. Потенциальная составляющая ошибки измерения угловых координат при автосо-провожденин определяется не только наличием шумов приемника, но и флуктуациями амплитуды (для> систем со сканированием) и фронта волны отраженного сигнала, а также инерционностью следящей системы. 25-4. МЕТОДЫ ИЗМЕРЕНИЯ СКОРОСТИ Измерение радиальной скорости движения цели относительно РЛС основано на использовании эффекта Допплера. Если  Рис. 25-58. К определению радиальной составляющей скорости цели. объект наблюдения (точка Ц на рис. 25-58J) движется в пространстве со скоростью V, а из неподвижной точки О излучаются колебания на частоте /изл, то частота колебаний, облучающих объект наблюдения, вследствие эффекта Допплера будет отлична от / изл н равна: /обл - /изл [ l-f- (25-81) где Vp - Vcosa - радиальная составляющая скорости объекта наблюдения. Частота колебаний, отраженных объектом, будет равна частоте облучения: /0тР = =/обл, но расположенный в точке О приемник из-за эффекта Допплера зафиксирует иную частоту приходящих отраженных колебаний: fnp - /1 (25:82) Так как обычно Vp-Cc, то fnp - /и (25-83) Из (25-83) можно видеть, что различие частот излучаемых и принимаемых колебаний (после нх отражения от объекта наблюдения) пропорционально радиальной составляющей скорости цели. Допплеровское изменение частоты колебаний равно: 2V cos a (25-84) а радиальная составляющая скорости (25-85) Ошибка измерения скорости, так же как н ошибка измерения любого другого параметра, определяется по формуле (25-5). Ошибки измерения возникают вследствие кривизны траектории распространения радиоволн: радиолуч не совпадает с прямой ОЦ (см. рис. 25-58), радиоволна подходит к цели с несколько иного направления, а измеренное значение допплеровской частоты соответствует проекции скорости цели на истинное направление прихода волны. Абсолютное значение ошибок невелико. Так, например, для цели, двигающейся со скоростью 6 км/сек, ошибка определения частоты сигнала не превышает 100 гц при самых неблагоприятных условиях как в тропосфере, так и в ионосфере. Для длины волны 30 см (наиболее короткие волны, для которых имеет смысл учитывать искривление траекторий) ошибка в допплеровской частоте 100 гц соответствует ошибке по скорости 15 м/сек. Потенциальная составляющая ошибки измерения скорости определяется шириной спектра сигнала (Д/с) и соотношением сигнал/шум Для импульсных сигналов гауссовой фор мы длительностью ти, не содержащих виут риимпульсиой модуляции, c(V) =-= v пот , I-- 2пУ 2R 2Vn tkV2R В формулах (25-86) и (25-87) величина R является результирующим отношением сигнал/шум за время накопления энергии сигнала. 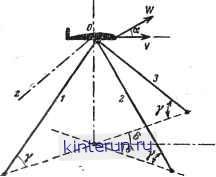 Рис. 25-59. К принципу действия самолетного измерителя путевой скорости. Общая разрешающая способность по частоте определяется формулой (25-10). Потенциальная составляющая разрешающей способности равна. (6V)n 0,75 ЯД/С (25-87) В радионавигации измерение доппле-ровских частотных сдвигов сигналов используется для определения абсолютной скорости движения летательного аппарата или . корабля. Допплеровские измерители путевой скорости и угла сноса (ДИСС). Рассмотрим самолет, летящий над земной поверхностью (рис. 25-59). Центр тяжести самолета является началом системы координат 0, х, у, г; воздушная скорость самолета V направлена вдоль оси Ох. При действии ветра реальная (путевая) скорость самолета W не равна воздушной ни по направлению, ни по модулю. Если на самолете установить три измерителя допплеровских частот, узкие лучи которых (1,2,3) направлены к земле, то, произведя независимые измерения допплеровских частот в трех точках земной поверхности, можно определить со- ставляющие путевой скорости самолета по осям Ох, Оу, Ог: -; (25-86) Wz = Wv =
4 sin у (25-88) При горизонтальном полете самолета можно определить модуль путевой скорости W и угол сноса а (угол в горизонтальной плоскости между векторами V и W): х tg а = I доп I I Fдоп W* Коп I + Коп *х Konl + Konl cos а 4 cos y cos б cos a ctg6; (25-89) Я. (25-90) Некоторые конструктивные преимущества делают целесообразным применение в таких допплеровских измерителях путевой скорости и угла сноса четырех лучей, но принципиальная сторона дела от этого не изменяется. При использовании ДИСС следует принимать во внимание две дополнительные потенциальные составляющие погрешности измерения допплеровской частоты. Первая из них возникает вследствие того, что луч антенны облучает на земле некоторую площадку, различные точки которой характеризуются неодинаковыми допплеровскими сдвигами. Сигнал содержит не одну доппле-ровскую частоту, а спектр частот. Среднее значение допплеровской частоты будет в этих условиях измеряться с ошибкой G(F) (25-91) где Д/доп - ширина полосы энергетического спектра допплеровских частот; Д/-ф - полоса пропускания фильтра нижних частот измерителя Вторая составляющая определяется движением самой отражающей поверхности (например, воды). Величина ошибки составляет доли процента (0,2-0,5%) от номинального значения допплеровской частоты. В радиолокации, как правило, измерения абсолютных значений допплеровских частотных сдвигов сигналов не производят, но факт наличия допплеровского смещения используется для улучшения разрешающей способности РЛС по азимуту (см. § 25-3), селекции целей по скорости движения и, в частности, для разделения движущихся и неподвижных целей.
|
|||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


