
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств , Синтезирование диаграмм направленности Для повышения разрешающей способности радиотехнического устройства по угловой координате необходимо сжимать диаграмму направленности его антенны в соответствующей плоскости. Известно, что применительно к зеркальным антеннам ширина луча определяется их раскрывом в соответствующей плоскости н длиной волны 6= - [рад]. Увеличение размеров антенны и уменьшение длины волны имеют границы, определяемые рядом факторов. Практическим пределом сужения луча в радиотехнических устройствах в большинстве случаев следует считать 1-2 . Более узкие лучи (до нескольких угловых минут) создаются, например, в самолетных радиолокационных станциях обзора земной поверхности, в которых используются вдольфюзеляжные антенны. Применительно к радиолокационным устройствам,- устанавливаемым на движущихся объектах, имеется возможность получить эффект как бы огромного сжатия реальной диаграммы направленности или, как говорят, синтезировать узкую диаграмму направленности. Принцип синтезирования. Принципиальная возможность синтезирования диаграмм направленности заключается в том, что если РЛУ перемещается в пространстве, то в зависимости от угловых координат целей изменяется допплеровский частотный 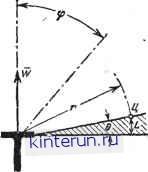 Рис. 25-53. К принципу действия РЛС с боковым обзором. сдвиг отраженных сигналов; селекция по допплеровской частоте сигналов позволяет обеспечить селекцию целей по угловой координате в пределах ширины луча РЛС. Выделение допплеровской частоты сигналов возможно только в когерентных станциях (см. § 25-4), поэтому синтезирование диаграмм направленности возможно только на базе когерентной техники. Рассмотрим когерентную самолетную РЛС с боковым обзором, у которой луч шириной 9 расположен под углом 90° к направлению полета (рис. 25-53). При скорости полета самолета W допплеровский частотный сдвиг сигналов точечной пели зависит от угла наблюдения ф и равен: Лдоп= - cos ф- (25-71) Цель Ц будет облучаться антенной РЛС в течение времени Г0бл: Т0бл - = - (25-72) За время 7обл угловая координата цели изменится на ширину луча и соответственно будет меняться допплеровская частота отраженных сигналов. Изменение допплеровской частоты за время облучения цели приблизительно равно [Л. 1]: Доп в (для ф 90°). (25-73) Например, при IF = 1 ООО км/ч, К - 3 см, 6 = 1° и г=300 км получим Го6л = 18 сек н Д/?дс,п=277 гц. Соответствующая обработка сигналов с изменяющейся допплеровской частотой и позволяет получить эффект сжатия луча. Имеются два принципиально различных пути обработки принятых сигналов. Фокусированная система синтезирования. Все сигналы, принятые за время облучения цели, трансформируются в один частотно-модулированный сигнал длительностью 70бл с частотной девиацией ДЕдоп. Этот сигнал обрабатывается в оптимальном согласованном фильтре, где происходит его сжатие в несколько раз. (/Ссж = 7облДЕд0п); соответственно во столько же раз улучшится разрешающая способность РЛС по угловой координате. Если в обычной РЛС линейное разрешение по азимуту на дальности г равно L=rQ (см. рнс. 25-53), то при синтезировании диаграммы направленности рассмотренным путем линейное разрешение по азимуту будет равно .спит = (сж = = A/2G. Ширина луча 6=i/c, поэтому синт=а/2, т. е. прн оптимальной обработке сигналов линейное разрешение по азимуту в синтезированной системе равно половине линейного размера реальной антенны РЛС. Например, прн г=300 км, 9 = 1° иа=2 м линейное разрешение обычной РЛС составит Z--5 км, а при использовании синтезирования /синт=1 М. Подобная система обработки сигналов позволяет получить максимально возможное сжатие луча РЛС н одновременно накопить наибольшую энергию отраженных сигналов. Практическая реализация рассмотренного пути обработки встречает большие трудности, проистекающие главным образом вследствие того, что длительность сигнала изменяется в зависимости от дальности и требуется менять параметры оптимального фильтра. Для просмотра какого-то диапазона Дальностей приходится использовать набор большого количества фильтров, что усложняет систему. И сфокусированная система синтезирования. Этот путь обработки сигналов сводится к фильтрации узкой полосы доппле-ровских частот из всего диапазона Д?д0п. 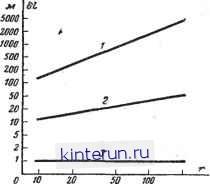 200км Рис. 25-54. Графики, характеризующие линейное разрешение по азимуту для РЛС различных типов. / - РЛС без сжатия; 2 - нефокусированные РЛС; 3 - фокусированные РЛС. Если полоса фильтрующего устройства Д/ф, то разрешающая способность по угловой координате будет улучшена в Д.Рдоп/Д.Рф раз. Если, например, ДРДОП = 250 гц, а полоса пропускания фильтрующего устройства Д?Ф = 2,5 гц, то разрешающая способность по угловой координате при синтезировании увеличится в 100 раз. Наименьшее линейное разрешаемое расстояние при таком методе обработки определяется формулой (25-74) синт- I / т. е. разрешение зависит от дальности цели. Нефокусированные системы характеризуются значитечьно более низкой разрешающей способностью, чем фокусированные, и значительно худшим использованием энергии излученных колебаний, так как отраженные сигналы используются полезно только в течение времени Тс, составляющего небольшую часть всего времени облучения цели, т. е. ; Т0бл: Д/Чр (25-75) Однако техническая реализация нефокуси-рованных систем гораздо проще, поэтому они получили широкое распространение. Так как при синтезировании диаграмм направленности используются сигналы, принимаемые в течение длительного времени 27-1248 (70вл или 7С), то можно говорить как бы о создании антенн с большим раскрывом, равным соответственно Лф = 70бл W=rQ для фокусированных систем н AKi, = Tc W - для нефокуснрованных. Например, при т= ~300 км, 6=1° и АРК0П1АРц, = 1№ эффективный раскрыв антенны фокусированной системы синтезирования равен А$=5 км, а нефокусированной системы Лл.ф = 50 м. На рис. 25-54 приведены графики, характеризующие линейное разрешаемое расстояние 61 для обычных РЛС, нефокуснрованных и фокусированных систем при линейном размере антенны РЛС а=2 м и КЗ см. Точность измерения при синтезировании. При использовании непрерывного излучения угловая координата цели измеряется, синтезированными системами однозначно, так как зависимость допплеровской частоты FaoTS от угла наблюдения ф имеет монотонный характер (рис. 25-55, пунктирная кривая). При импульсной работе РЛС частота амплитудной модуляции (/мод) сигналов на выходе фазового детектора не может превышать половину частоты следования импульсов (FmorFk/2), поэтому при изменении угла наблюдения цели в широких пределах зависимость частоты модуляции от угла наблюдения характеризуется неоднозначностью; график /гМОд(ф) для импульсной станции изображен на рнс. 25-55 сплошной линией. Если иметь в виду не-фокусированную систему синтезирования, в которой осуществляется узкополосная фильтрация допплеровских частот либо 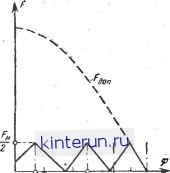 О рз\20 10 у2 60 ! 80 \ \*-В -й \*-6-А Рнс. 25-55. Зависимость частоты амплитудной модуляции сигналов в импульсных РЛС и частоты Допплера от угловой координаты цели. вблизи нуля, либо вблизи максимума частоты модуляции, то для обеспечения однозначности отсчета угловой координаты цели необходимо выбрать достаточно узкую диаграмму направленности реальной антенны РЛС. В пределах ширины диаграммы должно находиться не более одного максимума (или нуля) функции Рнод(ф), т. е. приближенно условие однозначности <2ф (25-76) Точность измерения угловой координаты целей синтезированной системой зависит от ошибок измерения истинной скорости движения летательного аппарата н случайного значения скорости собственного движения. При определении угловой координаты цели по измеренному значению FK3M допп-леровской частоты сигнала (вблизи ф=90 ) следует использовать формулу (25-71), в которую подставляется измеренное значение скорости полета №ИЗм: 1 2И/Н СОБфо, где фо - расчетный пеленг цели. Так как скорость полета измеряется с ошибкой AW и вследствие собственного движения целей может возникнуть дополнительный допплеровскнй сдвиг сигнала Рц, то в действительности измеренному значению допплеровской частоты будет соответствовать иное значение угловой координаты цели (фт): 2 (W + ДТП F 3M=---coscfi-r-rv (25-77) Различие значений ф0 и ф! является дополнительной потенциальной составляющей ошибки измерения угловой координаты. Эта составляющая ошибки может достигать нескольких градусов. При использовании не прерывного излучения в РЛС ширина первичной диаграммы направленности должна выбираться с учетом возможных угловых ошибок ез*2ф1 - фофане. (25-78) Если условие (25-78) не будет выполнено, то станция не примет полезного сигнала цели, так как за время нахождения цели в луче РЛС требуемая допплеровская частота получена не будет. В импульсных РЛС частота амплитудной модуляции сигналов не превышает FJ2. Поэтому если ширина луча (диаграммы направленности) РЛС равна угловому расстоянию между направлениями, соответствующими соседним нулям или соседним максимумам функции Рм0д(ф) (на рнс 25-55, например, показано 6ИМп=ф2- -фз), то при облучении цели в какой-то момент обязательно будет получен сигнал с заданным допплеровским частотным сдвигом. В данном случае дополнительная составляющая ошибки измерения угловой координаты не может превышать половины ширины луча РЛС, а ее среднеквадратичное значение равно: (°оот)доп - (25-79) Автоматическое сопровождение по угловым координатам Прн автоматическом сопровождении целей по угловым координатам равносигнальное или равнофазное направление антенной системы остается непрерывно направленным на выбранную цель, т. е. следит за целью. Это позволяет с высокой точностью определять угловые координаты цели, а также получать данные об угловой скорости перемещения цели относительно радиотехнического устройства. При автоматическом сопровождении целей чаще всего применяют пеленгационные устройства с коническим сканированием луг ча или моноимпульсные системы. Выходное напряжение пеленгатора используется для управления поворотом антенной системы таким образом, чтобы равносигнальное или равнофазное направление совмещалось с направлением иа цель. Система автоматического сопровождения при использовании конического сканирования луча (рис. 25-56). Передающее устройство, используемое в РЛС для облучения целей, на схеме не показано; предполагается, что тем или иным путем цель превращается в источник радиоволн. Коническое вращение диаграммы направленности антенны осуществляется с помощью двигателя сканирования. Перемеще ние антенны в вертикальной и горизонталь ной плоскостях обеспечивается двумя независимыми двигателями угла места н азимута. Если равносигнальное направление антенны не направлено на цель, то амплитуда принимаемых сигналов модулируется приблизительно по синусоидальному закону [см. формулу (25-70)]. На выходе приемника выделяется . переменная составляющая огибающей колебаний, называемая сигналом ошибки, иош = UBy cos (£V - Ч/ц). (25-80) С помощью двух фазовых детекторов вырабатываются управляющие напряжения Ua3 и <7у. , пропорциональные величине отклонения равносигнального направления антенны от цели в двух взаимно. перпендикулярных плоскостях. Выходные напряжения фазовых детекторов будут равны: в канале угла места Uy.n - k у cos ц, в канале азимута U&s = k у sin Эти напряжения воздействуют на двигатели угла места н азимута, которые поворачивают антенну, совмещая равносигнальное направление с направлением на цель. Опорные напряжения создаются специальным генератором опорного напряжения (ГОН), приводимым в действие двигателем сканирования; оба напряжения изменяются по синусоидальному закону с частотой вращения диаграммы направленности н отличаются друг от друга только сдвигом по
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


