
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств среднеквадратичным значением случайной составляющей ошибки; систематическую составляющую обычно принимают равной нулю. Можно считать, что и в радиолокации, и в радионавигации результирующая среднеквадратичная ошибка измерения величины X складывается из трех составляющих: o2acn+0nOT+o2an , (25-5) где арасп - составляющая ошибки из-за искривления траекторий распространения радиоволн; Опот - потенциальная составляющая ошибки, определяемая видом используемого радиосигнала и соотношением сигнал/шум на входе приемника; оап - аппаратурная составляющая ошибки, возникающая вследствие несовершенства измерительной аппаратуры и-методов отсчета. Среднеквадратичное значение потенциальной составляющей ошибки измерения дальности в оптимальном приемнике (см. т. 1, разд. 3, § 3-5) обратно пропорционально эффективной ширине спектра сигнала и корню квадратному из удвоенного отношения сигнал/шум о(г)пот =-°-~- . (25-6) 2Д/Э )/2Р. Здесь P=£c/Wo - отношение энергии сигнала (за время накопления) к спектральной плотности шума. Если, например, принимается пачка импульсных сигналов, то должна учитываться энергия всей пачки. Эффективная ширина спектра сигнала Д/э зависит от вида модуляции излучаемых колебаний. Для импульсных сигналов без внутренней модуляции она будет Д/э=£/ти, где k- =y3t - для импульсов колокольной формы и kx\-для прямоугольных импульсов. Для импульсных сигналов без внутренней модуляции колокольной формы о(г)пот (25-7) 2V.2R Среднеквадратичное значение потенциальной составляющей ошибки измерения угловых координат обратно пропорционально . пеленгационной чувствительности Sn (см. § 25-3) и корню квадратному из удвоенного отношения сигнал/шум: (о-ф)пот =-~(25-8) SnV2R В первом приближении крутизна пеленгационной характеристики численно равна относительному раскрыву антенны, т. е. а/К; она обратно пропорциональна ширине диаграммы направленности на уровне половинной мощности 6 в радианах: а \ Sn=T=T (25 9) где а - размер антенны в соответствующей плоскости. В § 25-2 - 25-4 дополнительно оценивается влияние особенностей распространения и приема радиоволн, а в § 25-5, 25-7 - несовершенства аппаратуры на точность измерения координат. Разрешающая способность. Разрешающая способность по параметру X может быть . представлена таким образом: Ь(Х) = 6(Х)ИОт + Ь(Х)ав. (25-10) Здесь 6(Х)пот - потенциальная составляющая разрешающей способности; 6(Х)ап - ухудшение разрешающей способности из-за несовершенства аппаратуры. Потенциальное разрешение по дальности (см. разд. 3, § 3-4) определяется эффективной шириной спектра сигнала: б(г)пот = -ZTT-f (25-11) /АГЭ что для смодулированных прямоугольных импульсных сигналов приводит к формуле в(/-)пот~ у (25-12) Разрешающая способность по угловым координатам приближенно равна ширине луча по уровню половинной мощности 6(Ф) от~е -. (25-t3) В § 25-3 дополнительно рассматривается вопрос о потенциальном разрешении по угловым координатам в когерентных уетт ройствах, а в § 25-7 оценивается влияние аппаратуры на разрешающую способность. Точность определения местоположения целей Как РЛУ, так и РНУ позволяют измерять порознь те или иные координаты целей и их радиальную скорость. Для решения же практических задач (самолетовождения, кораблевождения и т. д.) нужно определять пространственное положение целей, , являющееся функцией координат. Плоская картина расположения целей характерна при определении положения наземных и морских целей наземными же радиосредствами, а также при взаимодействии наземных РЛС с летальными аппаратами, высота которых h много меньше дальности г до объектов наблюдения (h<r). Одним из основных методов определения местоположения целей является нахождение точки пересечения линий положения каждой цели. Линия положения является геометрическим местом точек, характеризующихся постоянством какой-либо координаты или параметра движения цели. Примерами линий положения являются прямые постоянных углов и окружности заданных радиусов, проведенные из точек иаблюде- ния. Для определения положения цели на плоскости нужно иметь две пересекающиеся, линии положения. Например, достаточно одновременно измерить угловые координаты цели или ее дальности из двух разнесенных точек, или одновременно измерить дальность цели и ее угловую координату из одной точки наблюдения. 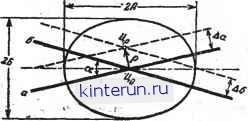 Здесь Рэ - вероятность расположения измеренной точки в пределах данного эллипса; е = arctg-. Значения члена У-In (1 - Рэ) характеризуются графиком на рис. 25-П. Часто точность измерения положения цели оценивают кругом, радиус которого равен среднеквадратичному значению ошиб- ки положения Y°l+c\- (25-18) Рис. 25-10. Эллипс ошибок иа плоскости. На небольшом участке любую линию положения можно представить отрезком прямой, поэтому можно считать, что положение цели на плоскости определяется пересечением отрезков двух прямых а и б (рис. 25-10). Положение каждой из линий определяется с ошибкой. Эти случайные ошибки представлены отрезками (Да и Дб). Расчетное местоположение цели характеризуется точкой Цр, а истинное - точкой До; расстояние между ними равно р: > ]/Даа + Дб8 ± 2ДаДб cos а -.- sin а (25-14) где а - угол между отрезками линии положения. Если распределение ошибок измерения линий положения подчинено нормальному закону со. среднеквадратичными значениями ошибок Оа и об, то распределение точек измеренных положений вокруг истинного (До) на плоскости подчиняется двухмерному нормальному закону распределения. Линии равной поверхностной плотности вероятности представляют собой эллипсы, площадь которых равна: S3= -г4-5 [-In (1 - Рэ)], (25-15) sin а а главные полуоси (см. рис. 25-10) У-1п(1- Рэ) Vsin2e Yl+-f 1-sin2 о sin2 2е х Vio а Об! V-1п(1 - Рэ) V sin 28 (25-16) У\ + j/~ I - sin2 a sin2 2s X V20a06 . (25-17) Вероятность попадания точки с измеренными координатами в этот круг равна 0,63- 0,67; она зависит от соотношения составляющих Ошибок Оа И Об- Для определения положения цели в трехмерном пространстве необходимо найти точку пересечения трех линий положений. Достаточно одновременно измерить три угловые координаты цели из трех точек (например, из двух, точек измеряется азимут, а из третьей - угол места *) или три дальности цели.  0,5 0,7 0,8 OjS 0,55 0JSS 0,S9 Рис. 25-1 J. К определению полуосей эллипса ошибок. В радиолокации наиболее употребительно определение пространственного положения цели путем одновременного измерения ее угловых координат и дальности. Если измерения проводятся из одной точки (место расположения РЛС), дальность цели равна г, среднеквадратичные значения ошибок измерения дальности, азимута и угла места равны соответственно аг, и ае> то среднеквадратичное значение ошибки места цели будет равно: Р = V o-V) + 2 о-2(<р) + г2 а2(6). (25-19) Интегральный закон распределения модуля ошибки места (т. е. вероятность того, что Углом места называется угол, лежащий в вертикальной плоскости и заключенный между линией радиотехническое устройство - цель и проекцией этой линии на горизонтальную плоскость. р не превысит наперед заданного значения х) располагается между нормальным законом (сплошная) и законом Максвелла (пунктирная линия иа рис. 25-12). Из этого графика можно видеть, что с очень большой вероятностью (Р>0,95) модуль ошиб-  Рис. 25-12. Интегральный закон распределения значений модуля ошибки места. ки не превысит удвоенное среднеквадратичное значение - 2р0. Поэтому часто 2ра считают мерой точности определения пространственного положения цели РЛС. 25-2/ МЕТОДЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ Возможность измерения дальности объектов наблюдения (т. е. расстояния по прямой между целью и радиотехническим устройством) основывается на постоянстве скорости и прямолинейности распространения радиоволн *. С учетом этого время распространения радиоволн U от радиотехнического устройства до цели и обратно связано с дальностью цели г очевидным соотношением tr = - (25-20) г = ~, (25-21) где с-скорость распространения радиоволн, принимаемая равной 300 000 км/сек. Для определения дальности ..нужно измерить время U, называемое обычно временем запаздывания принимаемого сигнала относительно излученных колебаний; Так, например, времени запаздывания в 1 мксек. соответствует дальность цели 150 м, в 1 сек - 150 000 км. Методы определения дальности подразделяются на амплитудные, частотные и фазовые в зависимости от того, какой параметр принимаемых сигналов играет основную роль при измерении времени запаздывания. * Ниже будет показано, что измерение дальности целей может быть основано также на использовании зависимости между дальностью цели и амплитудой отраженного от нее сигнала. Точность измерения дальности может быть оценена по формуле (25-5), а потенциальная составляющая вшибки определяется формулами (25-6) и (25-7). В реальных условиях траектории распространения радиоволн несколько искривлены и скорость распространения непостоянна. Это приводит к возникновению ошибок прн определении дальности объектов. Скорость распространения радиоволн вдоль земной поверхности изменяется случайным образом в зависимости от метеоусловий. Можно считать, что отношение среднеквадратичного значения изменения скорости распространения a(v) к ее среднему значению (vсР) равно: Это соответствует среднеквадратичной ошибке определения дальности 5 м на каждые 100 км. При нормальных атмосферных условиях для высот менее 30 км ошибка измерения дальности вследствие искривления траектории радиоволн в вертикальной плоскости достигает 60 м. Эта ошибка в принципе является систематической, так как при известном распределении температуры, давления и влажности воздуха. по высоте можно вычислить реальную траекторию радиоволн и определить поправку к измеренной дальности цели. Но так как точные данные р физических параметрах . воздуха обычно отсутствуют и нет точных сведений о высоте и угле места цели, то рассмотренную ошибку определения дальности можно считать случайной, равномерно распределенной в диапазоне ДГмакс-Д/ мин, где. Дгмакс - максимальное значение ошибки, а ДГмин - ее минимальное значение. Среднеквадратичное значение ошибки будет равно [Л. 2] (при Дгмив=0): о(гНАГмаке~Гмш~ 17 м. 2]/ 3 Ошибки определения дальности возникают также вследствие искривления траектории радиоволн и в ионосфере. Эти ошибки зависят от высоты h и-угла места 0 цели, а также от частоты излучения f радиоволн. Имеющиеся данные показывают, что для волн сантиметрового диапазона значения ошибки измерения дальности из-за влияния ионосферы ничтожно малы. В дециметровом диапазоне ошибки становятся заметными и существенно возрастают в области метровых волн. Абсолютные значения ионосферных ошибок измерения дальности характеризуются графиками [Л. 1], приведенными в верхней части рис. 25-13. На этом рисунке ордината (значение ошибки) равна Дг -- , где [-частота излучаемых /о колебаний; fo - плазменная частота ионосферы - величина, которая характеризует концентрацию свободных электронов; она
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


