
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств i 1 I 1 S I J I I Г Передатчик ЗапрйшиВаящий прибор Днтенная система Приемник Выходное устройство Сигнал запроса j, Сигнал ответа Йнтенная система Приемник Передатчик Ретранслятор (ответчик) К получателю Рис. 25-3. Получение ретрвт-лированных сигналов. Передатчик, используемый для облучения объекта наблюдения, и приемник отра-, женных сигналов не всегда составляют единое устройство и располагаются в одной точке пространства. Иногда используют так называемые разнесенные системы, характеризующиеся тем, что облучение объектов наблюдений производится из одной точки пространства, а прием отраженных сигналов - в другой (рис. 25-2). Такие системы называют полуактивными системами. Использование отраженных радиоволн является основным методом получения радиосигналов в радиолокации; некоторое применение этот метод находит и в радионавигации (радиовысотомеры, измерители путевой скорости). Отраженный сигнал несет наибольший объем сведений о самой цели. С его помощью можно определить дальность, угловые координаты, радиальную составляющую скорости движения цели, а также получить сведения о свойствах самой цели. Получение ретрансляционных сигналов (рис. 25-3).При этом методе получения радиосигналов - использовании ретрансляторов или ответчиков - взаимодействуют два радиотехнических устройства, одно из которых посылает радиосигналы запроса и принимает ответные сигналы, а второе - формирует ответные сигналы. Подобные системы называют системами с актив-н ьГм ответом. Ретранслятор срабатывает только при воздействии иа него радиоволн, излученных запрашивающим прибором. Сигналы запроса поступают через антенную систему в приемник ретранслятора и анализируются там, а далее в передатчик идет команда на посылку ответного сигнала. Ответный сигнал принимается и анализируется в приемнике и в выходном устройстве запрашивающего прибора. Этот способ получения радиосигналов находит широкое применение в радионавигации, а также в радиолокации при наблюдении за своими (см. § 25-5, стр. 464) объектами, снабженными специ- альной радиоаппаратурой (самолеты, спутники, корабли и др.). Использование собственного радиоизлучения цели. Этот метод получения радиосигналов может быть применен либо при наличии на объекте наблюдения работающего передатчика, либо при наличии контрастности теплового радиоизлучения цели и окружающего его фона. Излученные колебания от наблюдаемого объекта (рис. 25-4) принимаются радиотехническим устройст-  Приемник выходное устройство К получатели! - > Рис. 25-4. Использование собственного излучения объекта. вом, включающим антенну, приемник и выходное устройство. Подобный метод получения радиосигналов применяется как в радиолокации (определение угловых координат передатчиков помех, наблюдение теплоконтрастных целей на поверхности-Земли) и называется пассивной радиолокацией, так и в радионавигации (определение угловых координат радиомаяков, приводных радиостанций и др.). Однако этот метод дает наименьшую информацию о цели; он, как правило, не позволяет определить ни дальность цели, нн ее радиальную скорость. Отражающие свойства целей Способность различных целей отражать радиоволны характеризуется нх э ф ф е к - тивной отражающей площадью 0ц. Под эффективной отражающей площадью цели понимают размер фиктивной площадки, которая, будучи расположена на месте цели перпендикулярно направлению падающей волны, переизлучая принятую мощность равномерно во все стороны, создает в точке приема ту же плотность потока мощности отраженного сигнала, что.и реальная цель. Если плотность потока мощности падающей волиы у цели равна SBas, а эффективная отражающая площадь цели оц, то полная мощность облучения цели Р0бл = =Оц5пад; плотность потока мощности отраженной волны при расстоянии г между целью и РЛС в точке приема будет *: о рц пад Эффективная отражающая площадь целей является величиной случайной, значение которой зависит от угла падения радиоволны на цель, свойств различных элементов цели, их пространственного расположения, мгновенного значения частоты колебаний и других факторов. Обычно отражающие свойства целей характеризуют средним значением их эффективной отражающей площади оо. В табл. 25-1 приведены цифры, позволяющие оценить порядок средних значений эффективной отражающей площади объектов [Л. 2, 4]. Таблица 25-1
Основные характеристики РЛУ и РНУ К основным показателям РЛУ н РНУ относятся: размеры области пространства, в которой осуществляется наблюдение це- * Предполагается, что мощность облучения цели равна переизлучаемой мощности. Реально имеющиеся потери энергии прн отражении учитываются выбором значения о~ . лей, определение их координат и параметров движения; точность измерения коорди-ват целей и параметров их движения; разрешающая способность. Дальность действия. Границы области наблюдения целей (зоны-обзора) отдельной РЛС определяются тем, что в их пределах вероятность правильного обнаружения цели (см. т. 1, разд. 3) не меньше и вероятность ложной тревоги не больше 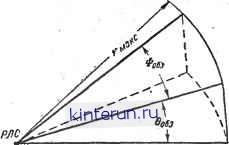 Рис. 25-5. Зона обзора РЛС. 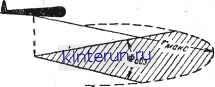 Рис. 25-6. Зона обзора самолетной PJIC.  Рис. 25-7. Рабочая зона ра дионавигационной системы. заданных значений. Зону обзора РЛС характеризуют тремя параметрами (рис. 25-5): максимальной дальностью обнаружения (гмакс). секторами обзора в горизонтальной (Ф0бз) и вертикальной (60б3) плоскостях. В некоторых случаях, например при наблюдении с самолета земной поверхности (см. рис. 25-6), зона обзора РЛС характеризуется только двумя параметрами - максимальной дальностью обнаружения и сектором обзора в горизонтальной плоскости. В радионавигации под рабочей областью или рабочей зоной отдельного РНУ или системы понимают ту область пространства, в пределах которой навигационные измерения осуществляются с необходимой точностью. На рис. 25-7 приведена рабочая зона радиодальномерной навигационной системы, включающей две наземные станции А и Б. На границе зоны ошибка определения места движущегося объекта наблюдения достигает предельного значения, а внутри этой зоны - ошибка меньше предельного. Дальность действия Р ЛУ и РНУ определяется в основном тремя факторами: условиями распространения радиоволн; возможностью обнаружения сигнала на фоне шумов (помех) с заданными вероятностными характеристиками; допустимой ошибкой определения координат или параметров движения объектов. В радиолокации при использовании от- раженных сигналов дальность действия устройства определяется возможностью обнаружения сигнала на фоне шумов приемника. Если принять эффективную отражающую площадь цели равной Оо, требуемое значение коэффициента различимости Яр (см. т. 1, разд. 3, стр. 133), импульсную мощность излучаемых колебаний Ризл, длительность принимаемых сигналов тс коэффициент усиления антенны при передаче Спер, эффективную площадь антенны при приеме Лэ и спектральную плотность мощности шумов в приемнике (или их энергию) No, то максимальная дальность обнаружения цели радиолокационной станцией ,.(по отраженным сигналам) с вероятностями правильного обнаружения Wn D и ложной тревоги Ил.т будет равна [Л. 1]: изл Тс Gnep °о Эта формула справедлива в условиях свободного пространства. На рис. 25-8 приведены графики, позволяющие оценить уменьшение дальности РЛС вследствие поглощения (гмакс.п) при условии, что размеры участков с поглощением превышают дальность действия станции. Параметром кривых является коэффициент поглощения б (см. т. 1, разд. 6). При приеме прямого излучения объекта, передатчик которого характеризуется параметрами Ризл, Тс, Опер, максимальная дальность обнаружения сигналов в шумах равна: Ризл tc Gnep (25-2) При использовании ультракоротких волн дальность действия РЛУ й РНУ ограничивается кривизной земной поверхности и определяется пределами прямой видимости. Если радиолокатор А и цель Б расположены на высотах hi и /г2 над земной поверхностью (рис. 25-9), то при нормальной рефракции атмосферы предельная дальность радиотехнического взаимодействия определяется по формуле Гпр - 4,-12 (V>h+ Vfh), (25-3) где hi и h2 выражаются в метрах, а гПр - в километрах. В тех случаях, когда дальность действия радиотехнических устройств, рассчитанная по формуле (25-1) или (25-2), превышает величину гПр, реальная дальность наблюдения объектов определяется кривизной земли, т. е. определяется формулой (25-3). 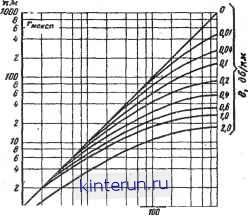 / г * в ю г * б г * в тоо Рис. 25-8. Уменьшение дальности действия РЛС-из-за поглощения.  Рис 25-9. К рассмотрению предельной дальности радиотехнических устройств. Если же ГмаксОпр, то реальная дальность действия рассчитывается по формуле (25-1) или (25-2). При использовании средних волн дальность действия радиотехнического устройства зависит от времени суток (см. т. 1, разд.- 6). Дальность действия коротковолновой аппаратуры также является функцией времени суток и длины волны. В радионавигации дальность действия устройств и систем часто определяется ве-обходимой точностью определения координат или параметров движения объектов. Если, например, допустимое значение линейной ошибки положения самолета равно Д/доп, а реальная ошибка измерения угловой координаты навигационным устройством составляет Дфизм (в радианах), то максимальная дальность действия определяется соотношением (25-4) Точность измерения. Точность измерения какой-либо величины характеризуют
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


