
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств конфигурацию ламелей, как это показано на рис. 24-137. Цифра младшего разряда снимается с триггера 7V Триггер Т± устанавливается в состояние 1, еели щетки первой до-(рожки замкнуты, и в состояние 0 - если щетки разомкнуты. Направление в изкеяип ламелей 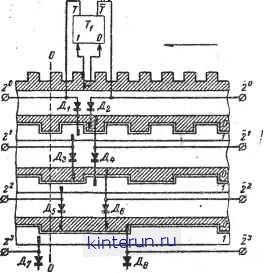 Рис. 24-137. Диодная схема для выбора щеток. Если триггер 74 находится в единичном состоянии, то на единичном выходе Т появляется высокий потенциал, являющийся вы-.ходным сигналом младшего разряда. Этот высокий потенциал через диод Д\ поступает на левую щетку второй дорожки. При этом щетка считывания второй дорожки окажется под высоким потенциалом и на выходе второго разряда будет высокий потенциал, соответствующий 1. Высокий потенциал через диод Д8 поступает на верхнюю часть третьей ламели, и на выход третьего разряда высокий потенциал не поступает. С выхода третьего и четвертого разрядов будет снят сигнал, соответствующий 0. Таким образом, считанное число равно ООП. Если щетки первой дорожки окажутся незамкнутыми, то триггер 7 i будет в состоянии, соответствующем 0. В этом случае на нулевом выходе Т триггера 7 ] будет высокий потенциал, который через диоды Д2, Д и соответствующие ламели пройдет на выход третьего разряда. С выхода третьего разряда будет снята 1. На выходах остальных разрядов, как видно из рис. 24-137, будет 0. Другие случаи могут быть проанализированы подобно рассмотренному. Если снимать выходные сигналы с дополнительных проводящих покрытий (верхние части дорожек, диоды Д2, Д4, Де, Дв), то будет считано число в обратном коде. Диоды в устройстве необходимы для пре- дотвращения замыкания между верхними и нижними покрытиями дорожек. Кроме рассмотренных конструктивных способов устранения ошибок за счет наличия зон неопределенности иа границах изменения разрядов, имеются другие методы, основанные на представлении чисел в специальных условных кодах. Один из подобных кодов, называемых кодом Грея, рассматривается ниже. Код Грея образуется из обычного двоичного кода путем замены в нем каждой пифры, стоящей правее единицы в соседнем разряде, на обратную. В табл. 24-9 приведены некоторые значения кода Грея для сравнения с двоичным, кодом. Таблица 24-9
На рис. 24-138 представлена схема расположения ламелей входного преобразователя, работающего по коду Грея. Направление дд жения ламелей - Младшим 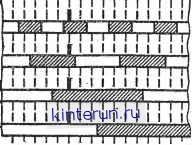 Рис. 24-138. Расположение щеток в преобразователе, работающем по коду Греяф Рассмотрение кода Грея (табл. 24-9 и рис. 24-138) показывает, что в любом случае два числа, следующих непосредственно друг, за другом, отличаются в коде Грея значени- ем только одного из разрядов. Благодаря этому ошибка преобразования в данном случае не может превысить единицы младшего разряда. Для использования результатов, снятых с преобразователя, построенного по коду Грея, необходимо перевести их из кода Грея в обычную позиционную систему счисления. Рассмотрим методы перевода кода Грея в обычный двоичный код. Пусть для двоичного числа X = XnXn-i... Х±Хо код Грея имеет вид: X -- XjiXn-1 ... XXq. Цифры кода Грея образуются по следующему правилу: Хп = Хп, (24-99) и цифры младших разрядов ( Xt, если Х1+1 = 0; 1 \l-Xit если Х{+!= 1. Данное равенство можно представить в виде Xi = Xt (1 -Xi + i) + + (1- Xi)Xi+1. (24-100) В самом деле, при Xi+i-О получим: Xi = Xi, а при Xi+i = l имеем: Х,-= (1- Xi). Формула (24-100) может быть записана еще следующим образом: Xi = Xi -f- Xi+i -2XiXi+i - Xi - - Xi+t - 2Xi+i(Xi - 1). Сложив полученные равенства no i в пределах от k до п-1, найдем: е xt =,Xk-Xn-2 S Xi+1 (Xi- 1). Учитывая равенство (24-99), запишем: п п-1 Хк = Б xt +2 Е Xi+1 (Х{ - 1). (24-101) Так как величина Xh может быть только нулем или единицей, то для определения величины Ху. можно воспользоваться весьма простым правилом, которое вытекает из формулы (24-101). Очевидно, что в этой формуле числа, стоящие слева и справа, могут быть одновременно либо четными, либо п-1 нечетными. Поскольку 2 Е Хг (X; - 1) fe=A всегда четное, то должны быть одновременно либо четными, либо нечетными Xh и Е т. е. при ,* делении на два оба зги (=* числа должны давать одинаковые остатки. Этот факт можно выразить математически в виде так называемого сравнения: Xk= Е *,-(пих12). (24-102) r*=fe Смысл данной записи как раз и состоит п в том, что величины Хк и Е JCj при деле-нии на два дают одинаковые остатки (Xh и S xt сравнимые по модулю два). (=* Таким образом, для получения цифры Xh двоичного позиционного кода из кода Грея достаточно произвести сложение по модулю два цифр кода Грея от п-го разряда до й-го включительно. Пример 1. Перевести число Х= 1001, представленное в обычной двоичной системе, в код Грея. Дано: Х=йХ4ВДЛЁ1 = 1001. Определить: X - Х4Х3Х2Х1. На основании правила перевода из обычной двоичной системы в код Грея [(24-99), (24-100)] имеем: 10 0 1 + МММ 110 1 Двоичное число АГ= 1001 в коде Грея имеет вид: х=1101. Пример 2. Перевести число £=11101, представленное двоичным кодом Грея, в обычную двоичную систему. Дано: x=xsX4X3x2x1 = 11101. Определить: Х=ХЪХ3Х2Х1. На основании (24-102) имеем: Хь - x5(mod2); Xs = 1; Xi = (*4 + x5)(mod2); Xt = (1 + l)(mod2) = 0; . X3 = (xs + хк + xs) (mod2); Хз = (1 + 1 + l)(mod2) = 1; Хг = (x2 + Хз + xt + *6) (mod2); X2 = (0 + 1 + 1 + l)(mod2) = 1; Xi = (xi + Xa + xs + xt + x5) (mod2); Xi = (1 + 0 + 1 + 1 + 1) (mod2) = 0. Числу 11101, представленному кодом Грея, соответствует двоичное число X = 10110. Кроме кода Грея существует ряд других кодов, на базе которых создаются преобразователи. Недостатком кода Грея является необходимость перевода его в обычный двоичный код, так как до сих пор нет простых арифметических устройств, оперирующих с числами, представленными в коде Грея или в каком-либо другом коде, обладающем аналогичными свойствами. На рис. 24-139 изображен шестиразрядный кодирующий диск для преобразователя угла поворота в число, представленное кодом Грея. Заштрихованные части представляют собой токопроводящие ламели. Для съема чисел служат скользящие щетки, каждая из которых обслуживает соответствующий разряд.  пени зависит от частоты вспышек лампы. Для современных ламп эта частота колеблется от 100 до 20 000 гц. За время одной вспышки кодирующий диск 2 должен повернуться не больше чем на одно деление младшего разряда. . Сигналы с фотодиодов 3 после усиления и формирования поступают на вход цифровой машины. Выбор типа преобразователя из непрерывных величин в дискретные зависит от того, в какой форме подается непрерывная величина (угол поворота, перемещение, временной интервал, напряжение и т. д.).  Рис. 24-139. Шестнразрядный кодирующий диск преобразователя угла поворота в число, представленное кодом Грея. ffxoff -J -Mr Рис. 24-140. Фотоэлектрический пре-I образователь угла поворота в число. Если считывающие щетки все время прижаты к кодирующему диску, то возникает большой момент трения, что уменьшает срок службы преобразователя. Для увеличения срока- службы преобразователя целесообразно щетки подводить к ламелям. только в момент считывания. Такой способ существенно уменьшает момент трения, но несколько усложняет конструкцию преобразователя. Для увеличения разрешающей способности применяются фотоэлектрические преобразователи, в которых считывание информации производится с помощью пучка света и фотодиодов. Кодовый диск изготовляется из стекла, на который фотоспособом наносится требуемый код. При считывании положения вала источник света дает узкий пучок, проходящий через кодовый диск на фотодиоды. На рис. 24-140 представлена одна из возможных схем фотоэлектрического преобразователя. Освещение производится периодически при помощи газоразрядной лампы Л Быстродействие преобразователя в большой сте- 
Исполнительные устройства Рис. 24-141. Блок-схема преобразователя числа в угол поворота вала. Преобразование дискретных величин в непрерывные. Управление реальными объектами с помощью . цифровой машины требует преобразования дискретных величин (чисел) в непрерывно изменяющиеся физические величины. Здесь мы рассмотрим преобразование чисел в угол поворота вала (цифра-угол) и в напряжение (цифра-напряжение). Наиболее простым способом преобразования числа в угол поворота вала является использование шагового мотора. На рис. 24-141 представлена блок-схема преобразователя числа в угол поворота вала. Выходные данные цифровой машины преобразуются в последовательность импульсов и поступают на шаговый мотор и счетчик. На счетчике устанавливается преобразуемое число. Каждый приходящий импульс от ГИ поворачивает выходной вал мотора на определенный угол и уменьшает число на счетчике на единицу. Импульсы поступают на счетчик и шаговый мотор через схему И до тех пор, пока показание счетчика не станет равным нулю. Описанный преобразователь не может быть применен для больших скоростей преобразования вследствие инерционности шагового мотора. Существуют более сложные преобразователи дискретных величин в угол поворота вала с использованием следящих систем. Преобразование дискретных величин в напряжение выполняется в основном дву-
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


