
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств Автоматика радиоустройств Различные аппараты и системы, в которых осуществляются целенаправленные действия в соответствии с вводимой в них информацией без активного вмешательства со стороны оператора, называют автоматическими системами. Управляющая информация содержится в управляющих воздействиях, поступающих на вход системы управления. Автоматические системы делятся на две группы: системы без обратной связи и системы с обратной связью - системы автоматического регулирования (САР). В системах без обратной связи способ действий не зависит от результата действий: характер функционирования автомата будет неизменным независимо от того, соответствует ли выходной эффект желае мому. Это происходит от того, что в таких автоматах отсутствует цепь передачи информации о результатах действия автомата, т. е. цещ> обратной связи. Системы автоматического регулирования В этих системах характер процессов (или способ действий) зависит от выходного результата, информация о котором по цепи обратной связи подается ко входу системы. Системы автоматического регулирования предназначены для автоматического (без активного вмешательства оператора) поддержания одной или нескольких физических величин на определенном уровне или изменения их в соответствии с управляющими воздействиями. Помимо управляющих воздействий на вход и на отдельные элементы системы воздействуют возмущения (помехи), на которые система не должна реагировать. Управляющие воздействия должны с наименьшими ошибками воспроизводиться, а возмущения - эффективно подавляться системой автоматического регулирования. Процесс управления в общих чертах происходит по следующей схеме (рис. 21-1). На измерительное устройство ИУ (или устройство сравнения) поступают: управляющая информация (или управляющее воздействие) со стороны входа; выходные сигналы (регулируемая величина) по цепи обратной связи. В ИУ производится сравнение управляющего воздействия с регулируемой величиной и при возникновении несоответствия между ними вырабатываются сигналы рассогласования, которые после усиления и преобразования воздействуют на объект регулирования, вследствие чего состояние объекта регулирования изменяется, а рассогласование уменьшается. Так образуется замкнутый контур наличие которого является определяющим признаком системы автоматического регулирования. Одновременно с управляющими воздействиями в различные точки контура управления поступают возмущения (помехи). Помехи, воздействующие на измерительный элемент Пш.у и объект регулирования Я0.р, обычно являются следствием изменения условий работы системы управления (температуры, давления, влажности и т. п.) Помехи Явх поступают на вход вместе с управляющим воздействием. В общем случае в систему могут вводиться дополнительные сигналы (ДС), полученные от вспомогательных измерителей. В этих сигналах помимо полезных составляющих, предназначенных для улучшения процесса унравле-. ния, также могут содержаться помехи Яд.С. В одном и том же объекте может происходить регулирование нескольких параметров. Например, при полете самолета (объект регулирования) могут быть поставлены требования сохранения высоты и курса. Это достигается с помощью рулевых органов, которые меняют свое положение под действием содержащихся в автопилоте автоматических систем стабилизации высоты и курса. Между отдельными сдстемами могут возникать связи, которые в некоторых случаях являются вредными, мешающими правильному функционированию системы, и поэтому их стремятся ослабить нлн устранить. Иногда, напротив, эти связи удается использовать так, чтобы в результате взаимодействия систем получить более благоприятные результаты. Системы автоматического регулировэ- fcr. ДС.П Измеритель -нов устройство Управляющие Воздействия Усилительные и преобразовательные элементы Выходные сиеналгн (регулируемые Величины вбгвнт регулирования Сигналы рассогласования Рис. 21-1. Общая Обратная связь ункциолальная схема системы автоматического регулирования. ния принято делить на две группы: системы автоматической стабилизации и следящие системы. Системы автоматической стабилизации предназначены для поддержания заданного (обычно неизменного) значения одной или нескольких регулируемых величин. При отклонении регулируемой величины 0вых от заданного значения 0Вх, вызванного какими-либо возмущениями, возникает рассогласование в; в измерительном устройстве ИУ величина 0 преобразу- 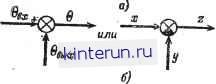 Рис. 21-2. Функциональная схема системы автоматической стабилизации. ется в сигнал, который проходит через промежуточные элементы ПЭ (усилители, преобразователи) и воздействует на объект регулирования ОР (рис. 21-2, и). В результате этого регулируемая величина изменяется так, что различие между указанными величинами 0Вых и 0Вх уменьшается и в идеальном случае они станут одинаковыми. Таким образом осуществляется стабилизация выходной величины 0Вых относительно заданного значения 0Вх. Схематические обозначения одной из основных операций, производимых измерительным элементом (образование сигнала рассогласования 0=ввх-вВых или z= =лг-у), приведено на рис. 21-2,6. Измерительные и промежуточные элементы иногда выделяют в отдельное устройство - автоматический регулятор Следящие системы предназначены для автоматического слежения за управляющим воздействием, которое может изменяться произвольно. Управляющим воздействием может быть величина углового перемещения объектов, расстояние между ними, частота или фаза колебаний и т д Измеренным значением управляющего воздействия является выходная величина 0BMi- В системах радиоавтоматики (см. разд. 22) управляющая информация заключена в различных параметрах высокочастотных колебаний, поступающих на антенну или вход радиоприемника, т. е. содер- жится в амплитуде, времени запаздывания, частоте или фазе этих колебаний. С выхода системы снимается измеренное значение управляющего воздействия в виде угла перемещения антенной системы или в виде напряжений, пропорциональных 0Вых. Существенных различий в принципах действия систем автоматической стабилизации и следящих систем нет, и отнесение автоматической системы к тому или иному классу носит условный характер и зависит главным образом от условий работы (характера управляющих воздействий). В системе автоматической стабилизации входное воздействие обычно является неизменным, и основная задача состоит в поддержании регулируемой величины на заданном уровне независимо от внешних возмущений, действующих на систему. В следящей системе основное значение имеет влияние изменяющихся управляющих воздействий, и задача системы состоит в возможно более точном воспроизведении этих воздействий независимо от характера их изменений и помех, воздействующих на систему. В дальнейшем все свойства рассматриваются применительно к следящим системам; результаты, полученные при анализе следящих систем, полностью применимы, и к системам автоматической стабилизации. Системы программного регулирования. Помимо перечисленных различают также системы программного регулирования. Они действуют как следящие системы с той разницей, что заранее известно, как будут изменяться управляющие воздействия, так как они задаются программой. Благодаря этому характеристики системы могут быть выбраны с учетом известной информации так, чтобы сделать систему возможно более точной. Примеры автоматических систем. Буквопечатающая радиоаппаратура (телетайп). При нажатии клавиши аппарата на передающей стороне посылается кодовый радиосигнал, который вызывает срабатывание соответствующей клавиши аппарата на приемной стороне, в результате чего печатается нужная буква. Обратной связи с приемного пункта на передающий пункт нет, и правильность полученного сообщения не контролируется. Таким образом, те летайп является циклическим автоматом. Ошибки, возникающие при передаче вследствие сбоя или радиопомехи, автоматически не исправляются системой: способ действий системы не зависит от результатов ее работы (т. е. от того, правильно или с ошибками ведется передача). Системы автоматической регулировки усиления. В радиоприемных устройствах для автоматической стабилизации уровня выходных сигналов используются системы автоматической регулировки усиления (АРУ) двух типов (рис. 21-3). АРУ в п е р ё д - когда регулирующее напряжение, полученное в результате амплитудного детектирования и усиления сигналов, снимаемых с выхода УПЧ, подается на последующие каскады усилителя колебаний низкой частоты (УНЧ) с переменным коэффициентом усиления. При увеличении амплитуды сигнала ывх на входе УПЧ возрастает напряжение регулирования, вследствие чего коэффициент передачи УНЧ падает. Регулирующее действие может быть рассчитано так, чтобы уровень выходных сигналов мвы* оставался при этом почти неизменным. Jl*j упч -р-* СЕрвтная ! ] гРязь j f Детектор и Рис. 21-3. Функциональная схема системы АРУ вперед и -гиазад . Усилитель промежуточной
Рис. 21-4. Функциональная схема системы АПЧ. Такая система лишена обратной связи, -и любые изменения коэффициентов усиления регулируемых каскадов (например, вследствие изменения характеристик элементов) не исправляются системой: поскольку цепь обратной связи отсутствует, нет информации об уровне выходного сигнала и, следовательно, о необходимости изменения регулирующего воздействия. АРУ н а з а д - когда регулирующее напряжение получается тем же способом, что и раньше, но под действием этого напряжения изменяется коэффициент передачи предшествующих элементов, т. е. каскадов УПЧ. В этом случае регулирующее действие зависит от величины сигнала на выходе УПЧ. Любые изменения величины этого сигнала передаются по цепи обратной связи от точки и через детектор и усилитель обратно к УПЧ и вызывают реакцию, направленную на стабилизацию этого уровня. Такая система является системой автоматического регулирования. Система автоматической подстройки частоты гетеродина радиоприемника (рис. 21-4) предназначена для автоматической стабилизации промежуточной частоты fnp, равной разности частот сигнала (/с) и гетеродина (fT). При отклонении частоты от номинального значения на выходе частотного дискриминатора системы возникает сигнал ыч.д, передаваемый на управитель частоты гетеродина. Частота гетеродина вследствие этого изменяется так, чтобы противодействовать изменению разностной (промежуточной) частоты fnp=fc-/г, т. е. система автоматически регулирует н стаби- лизирует разностную частоту /пр при уходе частоты гетеродина и изменении частоты сигнала. Однако систему можно рассматривать и как следящую, с помощью которой частота гетеродина следит за изменениями частоты сигнала. Во многих практических случаях основное значение имеет именно нестабильность частоты сигнала, и тогда рассмотрение системы АПЧ как следящей более удобно. Методы и результаты анализа не зависят от того, рассматривается ли эта система как следящая или как система автоматической стабилизации. Система автоматического определения направления на объект (автоматический радиопеленгатор). На рис. 21-5 приведена функциональная схема одного из простейших типов радиопеленгаторов, иллюстрирующая принцип работы системы. Благодаря \ использованию антенны направленного действия появляется возможность иметь на входе радиоприемника сигнал, амплитуда которого зависит от направления на работающую радиостанцию или объект, отражающий радиоволны. Диаграмма направленности периодически переключается (коммутируется) из положения / в положение . направление Обратная связь максимального при-/ J /г емо антенны I Дтгатет Антенны \ НапраХлент ттвжльт- \Лком утатор so приема антенны Л I- 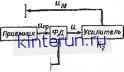 Рис. 21-5. Функциональная схема простейшего автоматического радиопеленгатора. При отклонении направления на радиостанцию от линии пересечения диаграмм (равносигнального направления) 00 (рис. 21-6,и), например, вверх сигнал, принятый антенной в положении / и пропорциональный отрезку йЪ, будет больше, чем сигнал, принятый антенной в положении (отрезок dc). В результате этого выходное напряжение приемника оказывается модулированным по амплитуде (рис. 21-6, б диаграмма 2). При изменении знака углового отклонения огибающая изменяет свою фазу на противоположную (отрезки db, йс на рис. 21-6, а и диаграмма 3 на рис. 21-6,6). Огибающая ыПр с выхода приемника поступает на фазовый детектор ФД, на который, кроме того, подается опорное напряжение с коммутатора, сфазированное с переключением диаграммы. Поэтому на выходе ФД образуется сигнал Ыф.д, полярность которого зависит от знака, а величина - от углового отклонения равносигнального напряжения от направления на радиостанцию. Этот сигнал после усиления поступает на двигатель, автоматически поворачивающий антенную систему в сторону
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


