
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Аналоговые вычисления Синтез подобия состоит в: 1) выборе подходящего объекта, который описывается уравнениями, сходственными с уравнениями, описывающими данный объект, 2) выводе уравнений констант; 3) выборе констант подобия, удовлетворяющих уравнениям констант; 4) обеспечении подобия условий одио-.значности. 4. Основы моделирования методом прямой аналогии Модель, выполняемая так, что каждому физическому параметру и элементу исходной системы соответствует независимо управляемый элемент модели, является моделью прямой аналогии [27, 28, 29]. Работая с такими . моделирующими устройствами, обычно оперируют физическими представлениями, характерными для исследуемого объекта. Изменение параметров модели прямой аналогии отождествляется с изменением конкретных параметров натуры, имеющих другую физическую природу (механическую, тепловую и т. д.), на основе аналогий, какими являются, в частности электромеханическая, электротепловая, электрогидродинамическая и др. Если аналогия между двумя видами явлений для общего случая предварительно установлена, то моделирование по методу прямой аналогии не требует записи уравнений. Модели прямой аналогии составляются непосредственно по графической схеме исследуемой физической системы. Они выполняются в виде электрических цепей, электрических сеток или проводящих сред. Примером являются модели нефтяных месторождений, представляющие как бы электрические геологические карты , на которых в процессе эксплуатации уточняется геология нефтяного пласта, прогнозируется процесс нефтедобычи на ряд лет вперед. В виде моделей могут быть представлены также волноводы, электронные приборы и т. д. Модели прямой аналогии являются более узкоспециализированными устройствами, чем структурные модели на операционных элементах, однако последние не могут удовлетворять всех потребностей моделирования, в особенности для физических систем с большим числом элементов (степеней свободы) и, главное, физических полей (краевых задач математической физики), где наиболее целесообразно использовать модели прямой аналогии. Электрические модели прямой аналогии основаны на представлении физических систем в виде эквивалентных электрических цепей. Электрические цепи могут служить и для физического моделирования электрических систем. Эквивалентные электрические цепи строятся при расчете установившихся и переходных процессов в различных электрических- машинах и ап-.,паратах и при разработке схем с транзисторами, электронными лампами, магнитных систем, проектировании электрических сетей и т. д. Распределение токов и напряжений в эквивалентных цепях систем описывается теми же уравнениями, что и процессы в исследуемых объектах, так что, по существу, эквивалентные электрические цепи являются физическими моделями исследуемых объектов. Наиболее важным практическим применением физического моделирования в электротехнике явились модели электроэнергетических систем, которые превратились в большие установки, называемые расчетными столами. Разработка аппаратуры расчетных столов оказала большое влияние на кон-, струкции электрических моделирующих устройств для других применений и на усовершенствование элементов электрических моделей. Различные формы моделирования сращиваются между собой, образуя эффективные и экономичные исследовательские комплексы, например, динамические модели энергосистем, в которых физическая модель электрической сети сочетается с аналоговыми структурными моделями электрических машин. Электромеханические аналогии. На рис. 1.1 изображены простейшие схемы упругой системы, которая имеет одну степень свободы, т. е. положение ее массы определяется одной координатой. В системе рис. 1.1, а масса т совершает продольные колебания в вертикальном направлении. Перемещению массы в других направлениях препятствуют ограничители. Трение об ограничители принято линейным (вязким).-На рис. 1.1,6 показана динамическая схема системы рис. 1.1,а. в которой выделены идеализированные механические элементы соответственно компонентам сил в уравнении динамического равновесия Даламбера; F + Fs + FeF(t). . , А, . (1.53.) dx dx 1 где Fm - tn- - сила инерции; ~ - трения; Fe = - x~ упру- гая сила дефорвррования по закону Гука (восстанавливающая сила); F (О - внешняя сила.  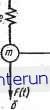 L с Рис. 1.1. Схемы упругой системы с одной степенью свободы (а, б) и ее электрические модели (в, г). Электрические модели механической системы могут быть построены в виде цепей из пассивных элементов по двум системам электромеханических аналогий (рис. 1.1, в, г). В первой системе энергия магнитного поля соответствует кинетической энергии, а энергия электрического поля - потенциальной. Во второй системе, наоборот, энергия магнитного поля соответствует потенциальной энергии, а энергия электрического поля - кинетической. Уравнению сил динамической системы в модели, составленной по первой системе аналогий, соответствует уравнение напряжений замкнутого контура схемы, а в модели по второй системе аналогий -. уравнение токов узла схемы. Сопоставление механических и электрических величин приведено в табл. 1.3. , Для системы с одной степенью свободы {рис. 1.1, а) уравнение динамического равновесия (1.53), в котором в качестве переменной принята скорость dx = , приобретает вид Fit). (1.54) Уравнению (1.54) в электрической модели (рис. 1Л, в), составленной по первой системе аналогий, соответствует idt., (1.55) Таблица 1.3
Уравнению (1.54) в электрической модели (рис. 1.1, г), составленной по второй системе аналогий, соответствует udt, (1.56) Обозначения величин в уравнениях (1.54), (1.55), (1.56) приведены в табл. 1.3. Для составления электрических моделей одномерных динамических си-етем. состоящих из большого числа упругих, инерционных и фрикционных элементов, целесообразно применение метода четырехполюсников. Модель одномерной механической системы составляется из отдельных элементов четырехполюсников так же, как составляется из элементов исходная система. При этом каждый элемент исходной механической системы замещается элементом электрической модели - четырехполюсником, воспроизводящим связи между силами и динамическими перемещениями на -концах. В табл. 1.4 приведены схемы замещения (четырехполюсники) для элементов упругой системы при растяжении или кручении. Разомкнутые выводы четырехполюсников соответствуют в первой системе аналогий жесткому закреплению конца стержня, а во второй - свободному концу его. Замкнутые накоротко выводы четырехполюсника, наоборот, соответствуют в первой системе свободному концу, а во второй - жесткому закреплению. В точках сопряжения пассивных четырехполюсников, замещающих элементы механической системы, включаются источники напряжения и тока, соответствующие приложению внешних сил. Узел, в котором сопрягается несколько ветвей механической системы, моделируется узлом электрической модели. В узле при первой системе аналогий сумма напряжений равна нулю, а при второй - сумма токов равна нулю. Из четырехполюсников, замещающих отдельные элементы, составляется электрическая модель динамической системы в целом. На рис. 1.2 показаны схемы из четырехполюсников, моделирующие одномерную механическую систему с несколькими степенями свободы. Токи и напряжения непосредственно не дают возможности различать геометрические направления в многомерных системах, а сложение составляющих сил и перемещений должно производиться геометриески. Идея электрического моделирования многомерных механическихсистем состоит
|
|||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


