
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Аналоговые вычисления Системы управления аналоговой машиной 203 различных автоматических систем обслуживания (установка коэффициентов, контроль, управление, измерение н регистрация результатов и др.) н, естественно, многообразием областей применения. 2. Системы управления аналоговой машиной - Основное назначение систем управления АВМ - задание различных режимов работы машины нли ее управляемых элементов (включение процесса решения, его остановка, возврат к исходному положению, периодизация решения, установка коэффициентов, контроль и настройка блоков и др.), установка н фиксация времени (периода) решения, синхронизация работы отдельных устройств машины. В состав систем управления АВМ входят: схемы управления интегрирующими усилителями, системы синхронизации и измерения времени, настройки нулей усилителей и дистанционной, установки значений постоянных коэффициентов. Определение состава систем управления в определенной степени условно, так как они не i-i р выделяются в отдельные устройства, а совмещаются с остальными системами обслуживания; Схема управления интегрирующими усилителями. Основными режимами работы интегрирующих усилителей являются ис- р (. 42. ходное состояние (задание начальных условий нли прием информации для запоминания), интегрирование н фиксация (остановка - запоминание информации). На рнс. 4.2 показана схема интегри-рующего усилителя. Для перевода интегрирующего усилителя в один из трех режимов достаточно подать различные комбинации управляющих напряжений на два вхо да управления (А и В) в соответствии с табл. 4.1. 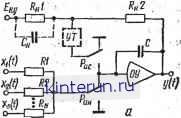 Входи управления Схема интегрирующего усилителя. Врежиме исходного состояния для ускорения чальных условий параллельно резистору *ельный Конденсатор С процесса установки на-иногда подключают дополни-емкость которого удовлетворяет условию RjCj, =а .= /? 2С.. При этол* выходное напряжение U = --п- н. у устанавливается практически мгновенно. Для этой же цели может служить и усилитель тока Таблица 4.1
Примечание. 1-напряжение на реле поданр; 0-гнапр?жение на реле не родано. УТ. Постоянная времени при приеме информации в этом случае равна -р-, где Kj - коэффициент усиления по току. Распределение команд от различных датчиков сигналов управления ко входам управления интегрирующих усилителей обеспечивается матрицей связи, которую можно построить нз любых коммутирующих элементов. Датчиками команд угфавлення могут быть: а) оператор у машины, который воздействует иа кнопки управления режимами машины; б) датчик сигналов периодизации решений (например, щетки шагового искателя в машине ИПТ-5), который автоматически подает на вход матрицы связи сигналы управления, аналогичные сигналам оператора; в) схемы образования команд условного перехода, например, схемы сравнения или компараторы, контакты реле которых замыкаются при выполнении наперед заданных соотношений в вычислительной схеме; г) схемы образования команд безусловного перехода, когда образование команды должно производиться в наперед заданный момент времени. Работа схемы управления уаязывается с работой системы синхронизации и измерения времени. С помощью заранее устанавливаемых связей в системе управления оператор имеет возможность отключить часть интегрирующих усилителей, подключить отдельные усилители или их группы к выходным сигналам схем условного или безусловного перехода и изменить последовательность подачи сигналов управления на входы интегрирующих усилителей для образования, например, динамических запоминающих устройств. В различных машинах схемное выполнение матрицы связи может быть различным. Отдельные элеме:гты коммутации этой матрицы могут входить в состав интегрирующих усилителей, как это выполнено, например, в машине ЭМУ-10. где подключение интегрирующего усилителя к схеме управления производится от коммутационного поля, а реле подключения находится в схеме интегрирования. Для современных АВМ характерно разнообразие датчиков сигналов управления и большая гибкость коммутации внутри матрицы связи за счет применения специального коммутационного поля, с помощью которого сигналы управления усилителями могут быть образованы в любой наперед заданной временной и логической последовательности. Система синхронизации и измерения времени. Предназначена для синхронизации по времени всех тех устройств, для которых независимой переменной является время. К числу этих устройств относятся интегрирующие усилители, блоки задания переменных коэффициентов, регистрирующие устройства, выполняющие запись переменных в функции времени, и устройства для измерения времени. Входящие в состав отечественных аналоговых машин системы синхроиизацни времени могут быть системами непрерывного, импульсного и смешанного типов. , В системах непрерывного типа синхронизация осуществляется с помощью линейно нарастающего напряжения. Эти системы просты по схемной реализации, однако точность отсчета времени эквивалентна Точности выполнения линейных операций. В системах импульсного типа для синхронизации используются импульсы, поступающие в приемники информации для возбуждения элементов изменения положения движущихся органов (щетки шаговых искателей, стрелки счетчиков времени и т. п.) или для возбуждения отметчиков времени в регистрирующих устройствах. В системах смешанного типа одновременно используются и линейно нарастающее напряжение и синхронизи-(рующне импульсы. По способу совмещения последовательности синхронизирующих импуль-чсов с моментами подачи сигналов управления системы могут быть с принудительным или свободным сопряжением. Всистемах с принудительным сопряжением обычно используются электромеханические датчики импульсов. При этом в матрицу связи поступают как сигналы управления от датчиков, так и синхронизирующие импульсы, а момент появления напряжений управления интегрирующими усилителями и начала подачи импульсов синхронизации на приемники информации является моментом совпадения сигналов управления (включения) с импульсами синхронизации наиболее низкой частоты. Внешне это проявляется в задержке команды управления в матрице связи и в других ценях управления до появления импульса синхронизации. Применение схем совпадения обеспечивает снижение погрешностей при измереннн времени. В системах со свободным сопряжением отсчет времени н все остальные операции включения начинаются сразу после подачи команды управления. В таких системах используются электронные датчики импульсов синхронизации, что дает возможность нспользовать команду управления для включения датчика импульсов синхронизации, режим которого устанавливается практически мгновенно. Применение электронных датчиков времени целесообразно лишь в машинах большого объема. Системы со свободным сопряжением обычно дополняются электронными счетчиками времени, которые снабжаются также схемами для образования команд безусловного перехода. Основные характернстнкн систем управлеиня некоторых отечественных аналоговых вычислительных машин приведены в табл. 4.2. Итеративные аналоговые вычислительные машины - это машины с дополнительными свойствами -иезависимого управления интегрирующими усилителями для выборки н передачи информации нз одного цикла операций или вычислений в другой параллельный или следующий цикл и со способностью выполнять необходимый минимум логических н программных операций. Обычно итеративные АВМ предназначены для работы в режиме быстрой периодизации решений н дополнительно к основному составу аналоговых решающих блоков и аналоговому коммутационному полю для образования структурной схемы содержат схемы сравнения аналоговых величин, счетчики, логические схемы и датчики импульсов нескольких частот для выполнения логических операций и реализации программы вычислительных работ, коммутационное поле сигналов управления. Последовательность выполнения отдельных операций итеративного процесса, переключение групп илн отдельных интегрирующих усилителей в различные режимы работы, переход к новым зн8че.нням параметров нли начальных условий, переключение внутренних электрических свя.чей с целью изменения структуры модели и др., выполняемых отдельно или в различных комбинациях, определяется в итеративных АВМ (как н в ЦВМ) в процессе их программирования. Процесс программирования таких АВМ, помимо обычных этапов программнровання, включает: составление программы (последовательности) выполнения указанных операций (подпрограмм) и логических решений, принимаемых в аналоговой и цифровой частях машины, обычно представляемой в виде блок-схем, аналогичных тем, которые используются при составлении программы для ЦВМ; составление программы поступления в соответствующие решающие блоки (в основном интегрирующие усилители) н элементы АВМ сигналов управления режимами их работы, т. е. составление временной диаграммы для сигналов управления. Сигналы управления при этом могут поступать of внешней системы управления (клавишные переключатели, реле, управляемые различными внешними устройствами), от программно-временного устройства АВМ или счетчиков подпрограмм, от аналоговых н цифровых логических схем машины; составление схемы соединений логических элементов для воспроизведения необходимых логических функций и последовательностей управляющих сигналов, которая дополняет основную схему моделирования, составленную из аналоговых блоков. .
|
|||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


