
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Аналоговые вычисления ф в напряжение U. Напряжение в угол преобразуется при помощи ЛП, включенного в схему электромеханической следящей системы с усилителем У и двигателем Дв (рис. 3.20, б). Умножение. Если в линейном потенциометре изменять t/ пропорционально переменной дг, ф - пропорционально переменной у, то выходное напряжение и будет пропорционально произведению г - аху. Потенциометр является при этом блоком перемножения (БП), масштабы которого т = = -7-г 1Пх = заны масштабным уравнением тц = -свя- атхту = 1. Рис. 3.20. к преобразованию и и и <f при] помощи линейного потенциометра. Деление. Операция деления при помощи линейного потенциометра может При помощи линейного потенциометра со средней нулевой точкой можно осуществить четырех квадрантное умножение. 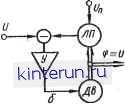 быть реализована в двух вариантах. В схеме, изображенной на рис. 3.21, а, входное напряжение усилителя пропорционально г = х - гу, двигатель Дв устанавливает движок в положение рис. 3.21. б при котором е = О и В схеме на 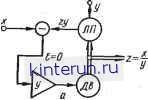 Рис. 3.21. Реализация операции деления. что означает возможность реализации зависимостей -;- , г -= -, с + У У где с = const. Воспроизведение функции z = F (jc). При надлежащем выборе зависимости R = R{L) схема (рис. 3.19) моделирует зависимость z = f (х) с масштабами При этом должно быть trij Шр, /Ид При Уд = const эта схема обеспечивает моделирование функции г напряжением г п* ;? в масштабе тц = -jj= . Масштабы и т. а также Шц и независимы друг от друга Функция F(x) должна быть монотонной и знакопостоянной. Для моделирования z сопротивлением R в случае иемоиотонной F(x) используются схемы, показанные на рис. 3.22. При одном минимуме функции (рис. 3.22, я) законы изменения сопротивления на участках АВ и ВС имеют вид Rt(L) = R,i-R(L); R(L) = R{L)-R. причем Ro - Rj 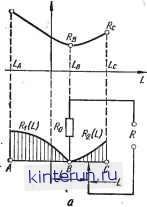 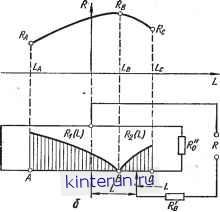 Рис. 3.22. Моделирование немонотонных функций сопротивлением. В случае одного максимума функции (рис. 3.22, б) Возможны схемы, обеспечивающие реализацию R{L) с несколькими максимумами и минимумами. Для моделирования z напряжением U в случае немонотонной или знакопеременной функции F(x) используются схемы показанные на рис. 3.23. При монотонной знакопеременной функции (рис 3.23, я) потенциометр имет 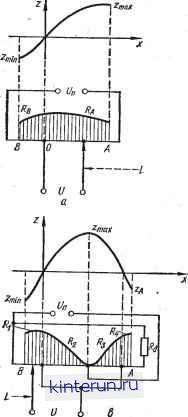 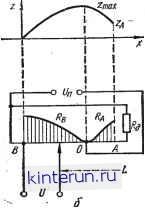 Рис. 3.23. Моделирование немонотонных функций напряжением. среднюю точку О. Полные сопротивления Rji и Rb участков ОА и ОБ определяются соотношением тах I min I В случае немонотонной знакопостоянной функции (рис. 3.23, б) потенциометр имеет добавочное сопротивление /?д, причем шах При немонотонной знакопеременной функции (рис. 3.23, в) сопротивления четырех участков и добавочное сопротивление должны удовлетворять соотношениям Вв Ri Воспроизведение функции г = F(x)y осуществляется при помощи любого потенциометра, предназначенного для моделирования F(x) в виде напряжения. Если напряжение питания этого потенциометра изменяется, пропорционально сомножителю у, то выходное напряжение моделирует z = F{x)y.
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


