
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Аналоговые вычисления Суммарную погрешность схемы одной нелинейной ячейки Ьу (если не учитывать погрешность дрейфа) можно представить зависимостью Ьу = Sibr. (X - Ai) и IX- Ai] - Si AAiU [X - At - ДЛ]. (3.12) где 8,. = S,, + \i = + - Ai = LAi + ДЛ = u (l + Значение относительной погрешности нелинейного элемента . Ч /X ,Г.х л,] X А{ м м (3.13) Погрешность воспроизведения нелинейной зависимости с помощью схемы, содержащей и нелинейных ячеек, является суммой п составляющих и определяется формулой X Ai м м М М i (3.14) Представим величину В. в уравнении (3.13) в виде где Ьад = В +i?Bt~ предполагается, что r>R. При практических расчетах или настройке схемы нелинейного преобразователя (если он является универсальным) величину и можно практически скомпенсировать так, что В = ~ Вц. Следовательно, Уо-Ь[-м-мГ[м~м\~1 м[ж-м~ =1 г=1 Максималйное значение погрешности где В;.р = max (B)j в = max (В ,), t = 1, 2.....п. Зависимость (3.15) устанавливает количественную связь между погрешностью воспроизведения функции, техническими харастеристиками схемы Фг видом заданной кривой (S, Ai). При проектировании специализированного нелинейного блока важно знать величины и So для того, чтобы правильно определить требования к параметрам 6 и 6, характеризующим точность различных частей схемы. На рис. 3.7 показана геометрическая интерпретация образования величин S] и So. Для получения величины S берется сумма абсолютных величин отрезков Вщ. а для получения величины S - сумма абсолютных величин отрезков Boi- Значения Б й 8ао определяются в основном классом используемых в схеме сопротивлений и отношением . Практи- чески величины 8, и 6 могут иметь порядок 0,1-0,01%. Поэтому точность воспроизведения может соответствовать 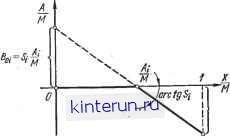 Рис. 3.7. Геометрическая интерпретация образования величин Sjyj и So- классу 0,2-0,02%. Экспериментальные исследования схем различных нелинейных блоков показали, что данные расчетных значений хорошо совпадают с опытными. Так, для квадраторов точность может соответствовать классу 0,03-0,05%, для тригонометрических блоков - 0,3-0,1%. 3. Диодный нелинейный блок воспроизведения функций двух переменных Рассмотренный выше метод получения функций от одной переменной можно применить для получения функций от двух переменных. Пусть функция Y - F{Xi, К.) задана таблицей координат узловых точек (Л, Лду, Вр. Можно построить функцию F* (Xi, X,) = 2 S fii (Xi, X,) = foo + 2 ft (i 0) + 1=1 /=1 г=1 +2 foi +2 2 fii (i> i) /=1 i=i /=1 которая будет совпадать с воспроизводимой функцией в узловых точках, а в промежутках между ними аппроксимировать функцию f (Xi, Х2) плоскостями, проведенными через ближайшие три узловые точки (рис. 3.8, а). Функция F*(Xi, Xj) содержит ряд элементарных функций, вид которых выбирается таким образом, чтобы функция f * (Xj, Xg) могла изменяться путем несложных регулировок, удобных в эксплуатационном отношении. Функция /оо - постойнная составляющая, которая представляет поверхность У = /оо параллельную плоскости (Xj, Xg). Функция fi (Xj, 0) = 2 о X X (Xj - Л,-о) и [Xi - Aio] - нелинейная поверхность, образованная параллельным переносом нелинейной функции, заданной в плоскости Х, Y (рис. 3.8, б). которая состоит из друх отрезков. Один отрезок лежит на оси (О, Х), а другой наклонен к этой оси под углом 9 = arclgSo. Таким образом, поверхность fto(.Xf, о) состоит из двух плоскостей. Функция (О, Хз) = 2 0/ (-2 - 0/) [-г ~ 0/] строится таким же /=1 образом, как и функция /io(Xi, 0). Функция /у (Х, Х) - нелинейная поверхность, образованная тремя плоскостями, может быть представлена выражением f{/ (-i -а) = Suf (1 - Aii) и At - At - (X, - Л2,.) (Xi - Au) L2. ,4-1 2f> 2j+i (Xi - Ai) - (X, - л .)]) X 1, j-f 1 ~ 1 и\Х,-Али\Х-Аф (3.16) 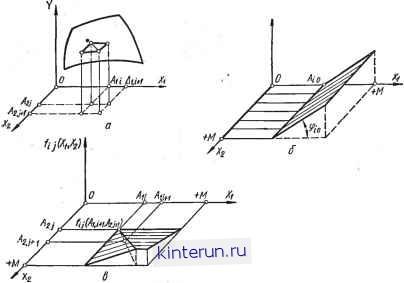 Рис. 3.8. К пояснению иллюстрации метода аппроксимации функции по четырем узловым точкам (а) и виды функций (б, в). бледовательно, О при Ху - < О или Ха - Aj < 0; Suf (Xi - Аи) при Xi - Ail < (X, - Лг,.); -*2, /+1 - 2/ Я/ (2 - 2/) при Xi - Лi > ~ (X, - Л.). 2, /-Ц ~~ 2/ Функция (Xi, Ха) обладает тем свойством, что при заданных величи- ах Ац и Aj полностью определяется значением /f,-(i ,.]. 2, Ж-
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


