
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Аналоговые вычисления Движение модели, реализованной на базе ОУ, после замены распределенных паразитных параметров сосредоточенными описывается системой уравнений Ч = fi(t xt, .... 4. xt.....4) + flit), t=l.....m, (6.83) где X* (0) = Xi (0); m > n; {f) - сигналы помех, возмущающие модель. Поэтому устойчивость модели определяется не системой уравнений (6.82), а системой (6.83). Отличие функций f] [t, xi.....x ) от fi{t, x*, .. . . x* x*i.....J иожет привести к тому, что модель будет неустойчивой, хотя моделируемый объект устойчив. Существенное влияние на устойчивость модели оказывают паразитные параметры в том случае, когда схема набора модели содержит замкнутые безынерционные контуры, в состав которых не входят инерционные блоки (интегрирую- . , fo , ..Xfff) щие. апериодические и т.д.), а также замкну- w° ~ >- -о тые контуры с четным числом решающих I--{ \ блоков, обладающих свойством инвертиро- -xAt) вания. Модель обычно бывает неустойчивой, если в состав ее схемы набора, реализованной /у на базе операционных усилителей, входят замкнутые безынерционные контуры с четным Рис. 6.19. Схема набора мо-числом усилителей и с коэффициентом переда- дели, неустойчивой при чи в разомкнутом состоянии Кр к>1. Воз- feifes> l из-за ииерционнос-можность существования эффекта неустойчи- сумматоров-инверторов, вости таких моделей иллюстрирует следующий пример. В модели безынерционного объекта (рис 6.19), который описывается системой уравнений kX - = 4 .{kx > 1. 3 > 1), передаточные функции сумматоров по каждому входу из-за паразитных параметров и инерционности усилителей имеют вид Kl (Р) = - 1 +Tip- Поэтому полюса изображения по .Лапласу для выходных сигналов модели Xi(f)h Ха(0 имеют положительные вещественные части, что говорит о неустойчивости модели. Появление в схеме набора модели замкнутых безынерционных контуров возможно не только при моделировании безынерционных объектов, но и при моделировании объектов, движение которых описывается системой обыкновенных дифференциальных уравнений, содержащих производные одного порядка нескольких зависимых переменных. Так, в схеме набора модели объекта, движение которого описывается системой уравнений (6.84) Xi = ~ xjii - ksXi -Ь Уг (ty, Хг = feXj -f- kj,Xi - keXf + Уг it), rnekOO, i=l.....6; ke> l; Xf(0) = Xjo. содержится замкнутый контур, выделенный на рис. 6.20 жирной линией, с коэффициентом Кр к = йзб> Неуетойчивые отдельные контуры, входящие в модель, обычно обусловли. вают неустойчивость всей модели. Исследование объекта с помощью модели надо начинать с проверки ее устойчивости. Для этого можно подвергнуть небольшим вариациям ее входные сигналы, начальные условия, параметры. Если данные вариации приводят к небольшим изменениями решения, то модель устойчива, в противном случае добиваются устойчивости проведением соответствующих преобразований, для чего предварительно определяют причину неустойчивости. С этой целью во многих случаях можно использовать прямые методы Ляпунова. В частных случаях на практике пользуются более простыми критериями устойчивости: алгебраическим критерием Раусса - Гурвица, частотным крите- fiHCM Михайлова, Найквиста 20] и т.д. Для обеспечения устойчивости модели неустойчивого объекта, движение которого описывается системой уравие- г = 1.....п, ДС; (0) = Xio, (6.85) Рис. 6.20. Схема набора модели инерцион- иногда целесообразно испольного объекта, содержащая неустойчивый зам- зовать переменный масштаб кнутый безынерционный контур. каждой зависимой переменной Xi{t) объекта Xi(t)=g,{t)e, (6.86) где а - достаточно большое положительное число. После подстановки выражения (6.86) в систему (6.85) последняя преобразуется к виду Vi (t) = - 2 f/ У1 - f w + 3 (0+% w- /=1 ii+i) (6.87) Величину a можно выбирать экспериментально или с помощью известных оценок [34] наибольших собственных значений матриц, если в системе (6.85) коэффициенты являются постоянными. При экспериментальном определении требуемого значения а варьируют диагональные коэффициенты матрицы уравнений (6.85) до тех пор, пока модель станет устойчивой. Переменный масштаб вида (6.86) также можно применять при моделировании некоторых неустойчивых нелинейных объектов. Преобразованием, часто приводящим к устойчивым моделям неустойчивых объектов, движение которых описывается дифференциальными уравнениями с краевыми условиями, является изменение масштаба независимой переменной t таким образом, что задача решается в обратном времени . При этом все функциональные зависимости в исходных уравнениях должны быть однозначными. Для моделей линейных объектов замена / = -х, т.е. переход к новой независимой переменной т, приводит к положительному результату в том случае, когда все корни характеристического уравнения движения объекта имеют положительные вещественные части. При анализе и определении устойчивости объекта с помощью моделей следует уменьшать влияние неидеальности модели на ее устойчивость до возможно меньшего уровня. Для этого из схемы набора модели исключают безынерционные неустойчивые контуры, если они имеются, путем приведения исходной системы дифференциальных уравнений к нормальному виду. Например, после исключения производных в правых частях уравнений (6.84) при ki - fegfej > 0. - kiko > О, fes - 26 О система приобретает вид Н = - iXf 4- ах 4- yi {ty, Ч = -S4 - Л + f/2 it) (6.88) 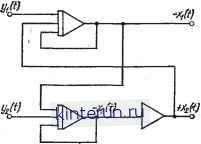 где ai>0 (г = 1.....4). Схема набора модели(рис. 6.21) для решения уравнений (6.88) не содержит замкнутые безынерционные контуры. Если же схема содержит неустойчивые безынерционные замкнутые контуры и отражает при этом структуру объекта, то это значит, что при математическом описании движения объекта были не учтены существенные малые параметры. Для продолжения исследований на модели целесообразно уточнить математическое описание объекта. В модели должны быть устойчивыми также все решающие блоки (суммирующие, интегрирующие, нС линейные и т.д.) в режиме автономного функционирования при всех возможных их входных сигналах. Устойчивость решающих блоков можно обеспечить дополнительными корректирующими связями в различных участках схемы блоков, например, включить емкость в цепь обратной связи ОУ. Однако такие связи обычно приводят к увеличению динамических погрешностей блока при быстроизменяющихся входных сигналах. Поэтому если корректирующие связи нежелательны или не приводят к требуемому эффекту, то следует изменить параметры схемы решающего блока или всю схему. Если в схеме набора модели нет неустойчивых блоков контуров и решающие блоки выполняют требуемые математические операции с погрешностями, которые на порядок меньше погрешности математического описания моделируемого инерционного объекта, то можно считать, что неидеальность модели практически не влияет на ее устойчивость. Для уменьшения влияния различных паразитных источников инерционности на устойчивость модели безынерционного объекта, схема набора которой состоит из суммирующих усилителей и потенциометров ввода коэффициентов, включают в обратные связи усилителей сравнительно большие емкости. Постоянные времени этих апериодических блоков во много раз превышают постоянные времени, обусловленные паразитными параметрами. При этом исходная система алгебраических уравнений Рис. 6.21. Схема набора модели, иллюстрирующая возможность исключения безынерционных контуров. AXb = Q преобразуется в систему дифференциальных уравнений = ЛХ 4- Ь, (6.89) (6.90). где А - матрица; Т циентов. . диагональная матрица; Ъ = вектор-стойбец коэффи-
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


