
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Аналоговые вычисления Вектор дисперсий решения системы (6.76) п п п 7=1 /=1 k=i 0 (6.78) где b,.(t)-элементы матрицы e; Kif.(t. т) - корреляционные функции погрешности Aft (t) задания (t). После перехода в выражениях (6.77) и (6.78) к нормам, получаются оценки для норм математических ожиданий и дисперсий элементов вектора ДК: IIМ [ДК] II < e-it II М [ДКо] II + еТ<-Н М [АА] К (т) + М [Д/ (т)] } d; II [ДП Их < е {Н О [ДКо] III -Ml D [Д/] II, + II i> im III f II Ко Hi / + II / II, -b f) Кольцевой тест. Для сравнения поточности и быстродействию различных типов моделирующих устройств в практике применения АВМ распространен кольцевой тест - процесс моделирования дифференциального уравнения второго порядка х-\-ах = 0, л;(0)=1, x(Si) = Q. (6.79) Структурная схема для решения уравнения (6.79) содержит два интегратора с передаточными функциями Wi (р) и (р) и один инвертор - (р) (с учетом различных паразитных параметров). Для анализа точности реализации кольцевого теста на АВМ применяют следующую аппроксимацию передаточных функций: P) = -i.\~ii + Pin,-Ti,]-, р 1 + рТ ~ р [У+Р(Т1-Т]- > (р) = -ks -*з [ 1 + Р (7-31 - Гз.)]. (6.80) где передаточные коэффициенты kf, k, kg выбираются из условия kikkg = = ш (с целью уменьшения дрейфа нуля ОУ и обеспечения их устойчивости коэффициенты к, < 50); Тц - постоянная времени. Выражения (6.80) достаточно точно аппроксимируют реальные передаточные функции интеграторов и инвертора при непрерывных рабочих входных сигналах. С учетом аппроксимации (6.80) характеристическое уравнение для модели имеет вид р + рГш + = О, (6.81) где. Г = Tf, + 721-1-7-81 - 71 - Г - Гз,. В уравнении (6.81) опущено слагаемое - Tla) (Tsi - Tsa) (Тз!- - Гзг) )* ввиду его малого влияния на решение (6.79) по сравнению со слагаемым рТт, Таким образом, уравнение кольцевого теста имеет вид х + шггг+и2 = 0; х(0) = 1; х(0) = 0. Выходной сигнал модели x*{t)==e Гт)1.% к, е cos 4it. Абсолютная погрешность решения уравнения (6.79) Iх:* (О - COS ш< i . / 2 3 4 т Рис. 6.16. Область возможных значений погрешностей решения уравнения (6.79) за один период на АВМ. На рис. 6.16 показана область возможных значений погрешности решения уравнения (6.79) при различных значениях частоты to и 0</<- на модели, эквивалентная схема которой показана на рис. 6.17. Здесь приняты во внимание только паразитные емкости и Cg операционного потенциометра типа ПС-3 и монтажа АВМ типа ЭМУ. 10. 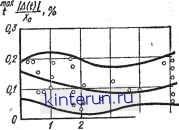 Рис. 6.17. Эквивалентная схема кольцевого теста с учетом паразитных емкостей потенциометра инвертора. 3 4 f-l.r4 Рис. 6.18. Область реальных значений погрешностей решения уравнения (6.79) за один период на АВМ типе ЭМУ-Ю при различных частотах генерирования. На рис. 6.18 показана область полученных экспериментально значений погрешностей решения (6.79) на АВМ типа ЭМУ-Ю при различных значениях частоты ю и 0<£ = (в экспериментах использовались операционные конденсаторы с емкостью 1 мкФ). Трудоемкость строгого анализа погрешностей сложных нелинейных моделей превышает трудоемкость набора, отладки моделей и получения результатов моделирования. Поэтому с высокой точностью определяют погрешности только специализированных моделей, предназначенных для длительного решения какой-либо одной задачи. В практике вычислительных центров распространенным приемом получения информации о точности сложных нелинейных моделей инерционных объектов является сравнение выходных сигналов моделей с некоторыми известными моделируемыми величинами в эталонных режимах , т.е. при определенных видах возмущений, начальных условий и т. д. Известные характеристики эталонных режимов могут быть получены при проведении физических экспериментов с моделируемыми объектами или при решении соответствующих систем уравнений на цифровых вычислительных-машинах. Результаты сравнения дают возможность приближенно определить порядок ошибок моделей. 5. Устойчивость электронных моделей Устойчивость модели - свойство модели, обусловливающее отклонение ее реальных вых;0дных сигналов от идеальных на допустимо малые величины, если сигналы помех, возмущающие модель, находятся в заданных допусках, а независимые переменные модели изменяются на конечных интервалах. В качестве идеальных подразумеваются выходные сигналы модели, реализующей абсолютно точно требуемые математические зависимости, в которых сигналы помех не фигурируют. Источниками и сигналами помех являются отклонения значений параметров модели (сопротивлений, емкостей и т. д.) от номинальных, флуктуации напряжений питания, различные паразитные наводки ИТ. д. Понятие устойчивости модели является частным случаем понятия точности модели. Если модель неустойчива, то она неточна (если даже сигналы помех находятся в заданных допусках). Однако обратное утверждение не всегда верно, т. е. из того, что модель неточна, не следует, что модель неустойчива. Недопустимо большие ошибки в выходных сигналах модели могут быть обусловлены тем, что величины сигналов помех превышают заданные допуски. Понятие устойчивости модели соответствует [20] понятию устойчивости движения при постоянно действующих возмущениях уравнений (техническая устойчивость). Под движением здесь понимается любой процесс изменения состояния исследуемой модели или моделируемого объекта. Сигналы помех модели в математической теории устойчивости называются возмущениями уравнений- Идеальные, реальные выходные сигналы модели и их разности называются соответственно невозмущенным, возмущенным движением и возмущением движения. Во многих случаях анализ устойчивости модели можно свести к более простому анализу устойчивости движения по Ляпунову. Устойчивость моделей инерционных объектов, движение которых описывается интегро-дифференциальными уравнениями, зависит в основном от устойчивости моделируемых объектов, так как при моделировании неустойчивых объектов обычными методами разность между идеальными и реальными выходными сигналами модели в большинстве случаев достигает недопустимо больших значений. Неустойчивость моделей как инерционных, так и безынерционных объектов, которые описываются конечными уравнениями, может быть обусловлена и неидеальностью моделей: паразитными источниками инерционности (например, сосредоточенными и распределенными паразитными емкостями, индуктивностями); отклонениями от номинала полезных параметров; погрешностью аппроксимации функциональных зависимостей, ошибками методов поиска экстремумов и т. д. Влияние перечисленных факторов проявляется в том, что вместо требуемых математических зависимостей между входными и выходными сигналами модели существуют иные зависимости. Например, пусть движение моделируемого объекта описывается системой уравнений xi = ft (Л Xi.....Хп), Xf (0) = Xio, / = 1.....п. (6.8.2)
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


