
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Аналоговые вычисления никовым диодом и ее эквивалентная схема показаны на рис. 6.15, а и б {Сц -< паразитная емкость резистора R, емкость корпуса и монтажа диода; - нелинейная емкость р -я-перехода; Ag- омическое сопротивление базового слоя, принимающее значения от нескольких долей ома до десятков см; Гу - сопротивление утечки; а - нелинейное сопротивление). [ . Значения нелинейной емкости при закрытом диоде колеблются от единиц до десятков пикофарад, а в случае открытого диода определяются по формуле [19] qh- qU /kT где q - заряд электрона; Ig - тепловой ток диода? t - время пролета электрона через активную базу; k - постоянная Больцмана Т - абсолютная температура по Кельвину; (У - падение напряжения на диоде. ety И Сим, ср . Рис. 6.15. Схема диодно-резиеторной цепочки (а) и ее эквивалентная схема (б). 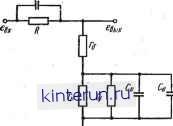 Вольт-амперная нием / [28] характеристика резистора с нелинейным сопротивле- где Л и В эмпирические коэффициенты; /g-= ток через резистор с сопротивлением Tg. Приборные погрешности схем сложных нелинейных блоков можно иайти при известных вероятностных характеристиках параметров схем замещения диодно-резисторных цепей с помощью линейной теории точности или посредством метода Монте-Карло. 4. Методы анализа точности решения задач Если известны характеристики погрешностей операционных элементов решающих блоков модели, то в общем случае имеется возможность получения и исследования уравнений или выражений для погрешностей выходных сигналов модели. Системы линейных алгебраических уравнений Рассмотрим анализ приборных погрешностей моделирования линейных систем, т. е. погрешностей решения на АВМ систем линейных алгебраических уравнений АХ = Ь, (6.52) где А = {ац)1 - квадратная п X п матрица коэффициентов а-; Ь - вектор-столбец коэффициентов bi (I = I, п); X - вектор искомых значений xi (i = n). При анализе погрешностей решения этой системы уравнений предполагают, что реальные части всех собственных значений матрицы А не равны нулю и имеют одинаковые знаки, что позволяет решать систему на АВМ С помощью схемы, показанной на рис. 5.19; инверторы в этой модели не вносят погрешностей; все масштабы единичные; в уравнениях погрешностей типа (6.33) для каждого сумматора уже вычислены все коэффициенты и слагаемые, кроме неизвестных xi. Тогда систему уравнений, которыми описывается модель, после затухания переходных процессов можно представить в виде (А + АА) (X + АХ) = b + АЬ, (6.53) где АА = [Aaj] - матрица погрешностей Аа. установки в сумматорах коэффициентов aj; АХ - вектор значений Axi погрешностей искомого решения, полученного на АВМ; АЬ - вектор-столбец погрешностей Abi задания праиых частей. Согласно выражению (6.33) погрешность где -составляющая, обусловленная неточностью опорного напряжения, установки потенциометра при вводе в модель величины fc/; все остальные компоненты выражения (6.54) для i-ro сумматора аналогичны соответствующим компонентам в выражении (6.33). После вычитания из (6.53) системы (6.62) находят систему уравнений для определения погрешности моделирования ААХ = АЬ-ААХ - АЛАХ. (6.55) Если опустить в этом уравнении члены второго порядка малости, то ААХ АЬ - ААХ, что позволяет вычислить в рамках линейной теории точности погрешность АХ /4-1 (Ah - ААХ). (6.56) Для вычисления ДХ необходимо знание точного решения, которое неизвестно. Поэтому в выражение (6.56) подставляют вместо X приближенное реш.ение X -\- АХ = X*, полученное на модели, и расчетное выражение принимает вид АХ = A- (АЬ - ААХ*). (6.57) Затем, считая, что все случайные величины в выражении (6.57) независимы между собой, определяют векторы математических ожиданий и дисперсий [141: MlAX]=A~(MlAb]-M[AA]X*); (6.58) D [АХ] = AY (D [АЬ] - D [АА] Х. (6.59) где М,[А6] и D [АЬ] - векторы-столбцы математических ожиданий М [АЫ] и дисперсий D[Ab{] элементов Abi; М[АА], D[AA]-матрицы математических ожиданий Л1 [Дау] и дисперсий £1 [Доу]; - матрица, элементы которой равны квадратам элементов матрицы А X* - вектор-столбец, элементы ко- торого равны квадратам элементов вектора X*. Для снижения трудоемкости вычисления вероятностных характеристик - ошибки моделирования с помощью выражений (6.58), (6.59) во многих случаях находят и применяют детерминированные и вероятностные оценки вектора д.У. При этом удобно воспользоваться нормами матриц [11, 44] II А 111 = max 2 I I первая норма; IIА г = max У] а \ - вторая норма; i 1=1 II/4 Из = max р( - третья норма, . где Pi -максимальное собственное число матрицы VАА {А - транспонированная матрица А), и соответствующими им нормами векторов AXi = maxJAxf; laIU = i Д h- Нормы векторои удовлетворяют неравенствам даг,1<1д1<д8<д Из. lTTh. (6.60) Переходя в выражениях (6.56) и (6.57) к нормам, получают неравенства для нормы вектора абсолютных погрешностей II11 < \\А- И (II дл II II II + IIII); (6-61) II LX II < II А- II (II LA II . II X* II -Ь Д& II). (6.62) Согласно вытекающему из (6.52) соотношению - К 1 Ц &, неравенство (6.61) запишется II II < IIА- II (II М II . II А- II. II & II + II И). (6.63) Неравенства (6.62), (6.63) можно использовать практический том случае, если известно приближенное решение X*, так как только при этом можно вычислить приближенные относительные погрешности. Поэтому часто используют априорные оценки модулей относительных погрешностей.решеиия Ш±<\\А~ги\\ . /11-11 I 1ДМ1\ 1 \\х\\<\\ 1 11Ц-ЙГ + ТТГ) 1-1М-М111М -
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


