
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Аналоговые вычисления -T-Ci -V 7Ik 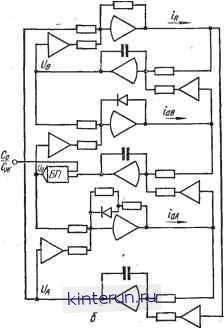 Рис. 5.36. Схемы моделирования системы кровообращения. большой круг , а также объединить емкости вен и предсердия, то полу-чим -наиболее упрощенную схему модели (рис. 5.36, а), в которой сердечные клапаны представлены диодами. Пороки клапанов моделируются сопротивлениями Rp и R. При увеличении емкости управляемого конденсатора он заряжается через один из диодов, а при уменьшении -- разряжается через другой. Схема диодного насоса переносит электрический заряд от низкого потенциала к высокому так же, как сердце перекачивает кровь из вен в артерии. Изменение емкости моделирует систолический процесс. Модель на операционных элементах (рис. 5.36, б) получена непосредственно из модели электрической цепи (рис. 5.36, а) с обеспечением независимого управления каждым элементом. Сердечные клапаны и их пороки моделируются дуальными цепями в обратных связях операционных усилителей. Приведенные выше примеры позволяют выявить особенности методики построения моделей без составления уравнений. На рис. 5.35, а-д показаны модели прямой аналогии на операционных элементах для более сложной механической системы. Из рисунка видно, что в цепях обратной связи операционных усилителей включены прямые или дуальные комбинации элементов цепи, представляющие элементы Z(p) и Y(p) в моделирующих пассивных четырехполюсниках. Третий пример относится к моделированию замкнутой системы кровообращения по методу прямой аналогии. Электрическое напряжение соответствует давлению, ток - расходу, а заряд - объему крови. Гидравлическим емкостям и сопротивлениям соответствуют электрические. Особенностью замкнутой модели является моделирование сердечного насоса. Для этого не подходят известные в теории электрических цепей источники напряжения или тока, так как они, в принципе, не обеспечивают сохранения постоянства заряда, т. е. количества крови, циркулирующей в системе. Физически обоснованная модель замкнутой системы кровообращения отличается тем, что сердце представлено в ней в виде специальных схем диодных насосов на управляемых конденсаторах переменной емкости. Если в схеме кровообращения выделить Усложнение схем двухполюсников Z(p) и К(р) может дать существенную экономию операционных усилителей по сравнению с обычными схемами структурного моделирования. При составлении модели по блокам очень наглядно выявляется правильность выбора знаков, т. е. расстановки инвертирующих элементов, а именно, в каждом замкнутом контуре модели при моделировании пассивных цепей должно быть нечетное количество операционных усилителей. Наилучшим образом комплектуются цепочки четырехполюсников, в которых перемежаются элементы с последовательно включенными сопротивлениями Z{p) и параллельно включенными элементами К(р). При этом согласование входов и выходов соседних четырехполюсников получается с помощью простых проводящих перемычек. Если же рядом находятся однотипные четырехполюсники, то для согласования входов и выходов операционных элементов требуются схемы сопряжения на операционных усилителях в режиме следящих систем (см. табл. 5.6). В моделяха операционных усилителях необходимо избегать использования индуктивностей и дифференцирующих элементов. Поэтому моделируемые четырехполюсники с параллельными индуктивностями или последовательными емкостями следует заменять обратными. Под обратными понимаются четырехполюсники, в которых индуктивности включены последовательно, а емкости параллельно, т. е. модели которых содержат емкости в цепях обратных связей усилителей. Для такой замены обратный четырехполюсник сочетается со схемой узла цепи. Из табл. 5.6 видно, что схемы последовательных и параллельных улов цепи представляются в моделях различными операционными блоками в зависимости от условий согласования входов и выходов моделей четырехполюсников, сопрягаемых в узле. При построении моделей нелинейных четырехполюсников диодные ячейки включаются как в цепи входа, так и в цепи обратной связи операционного усилителя, что дает возможность использовать прямые и обратные нелинейные зависимости. В более сложных случаях сопрягаемые между собою модели четырехполюсников электрической цепи строятся на нескольких операционных усилителях. Литература 1. А г е е в М. Д. О моделировании теплообменных аппаратов.-В сб.! Применение методов математического моделирования в инженерных исследованиях . М., МЭИ, 1962. 2. Васильев В. В., Клепикова А. Н., Ти м о- ш е н к о А. F. Решение задач оптимального планирования на электронных моделях. Киев, Наукова думка , 1966. 3. Верлань А. Ф. Методы решения интегральных уравнений на аналоговых вычислительных машинах. Киев, Наукова думка ; 1972. 4. Верлань А. Ф., Евдокимов В. Ф. Электронное моделирование передаточных функций. Киев, Техн1ка , 1970. 5. Верлань А. Ф., Евдокимов В. Ф., Годлевский B.C. О применении методов моделирования передаточных функций.- В сб.: Аналоговая и аналого-цифровая вычислительная техника . Вып. 3. М., Советское радио , 1969. 6. В и т е н б е р г И. М. Быстродействующие аналоговые машины, М., Энергия , 1971. 7. В и т е н б е р г И. М. Программирование АВМ. М., Машиностроение , 1972. 8. Витенберг И. М., Танкелевич Р. Л. АВМ с последовательным выполнением операций. М., <вЕергия , 1968. 9. В о л ы н с к и й Б. А., Б у X м а н В. Е. Модели для решения краевых задач. М., Физматгиз , 1960. 10. F л у 3 б е р р Э. А. О логических возможностях математических машин непрерывного действия.- В сб.s. Вопросы теории математических машин . М., Физматгиз, 1958. П.Коган Б. Я. Электронные моделирующие устройства и их применение для исследования систем автоматического регулирования. М., Физматгиз, 1963. 12. Коган Б.. Я., П е.т р е н к о Ю. И., Чернышев М. К. О моделировании иррациональных передаточных функций.- Автоматика и телемеханика , 1968, № 7. 13. К у Ч е н, К а 3 д а Л., Уиндкнехт Т. Решение дифференциальных уравнений с частными производными вероятностным способом при помощи электронных моделей. Труды Г Конгресса ИФАК. Т. 3. М., Изд-во АН СССР, 1961. 14. Л у к ь я н о в А. Т. Специализированная модель для решения не-линейных уравнений математической физики. В сб.: Вопросы теории и применения математического моделирования . М., Советское радио , 1965. 15. Л ы ч к и н а Г. П., Н е т у ш и.л А. В., Т е т е л ь б а у м И. М. Моделирование иррациональных передаточных функций.- В сб.: Вычислительная техника в управлении . М., Наука , 1966. 16. П а ш к о Д. И., Степанов А. Е. Интегратор переменной структуры для решения краевых задач. - Вопросы радиоэлектроники. Серия электронная вычислительная техника , вып. 2, 1971. 17. П у X о В Г. е., F р е 3 д о в Г. И., В е р л а н ь А. Ф. Методы решения краевых задач на электронных моделях. Киев, Наукова думка , 1965. 18. Р ы б а ш о в М. В., Дудников Е. Е. Градиентные методы решения линейных равенств, неравенств и задач линейного программирования иа АВМ. М., Советское радио , 1970. 19. С и м в о л ы для средств АВТ и АЦВТ. М., Изд. НИИСЧЕТМАШ, 1972. 20. Строчная форма записи программы АВМ. М., Изд. НИИСЧЕТМАШ, 1972. 21. Тетельбаум И. М. Электрическое моделирование динамик привода механизмов. М., < Энергия , 1970. 22. Ч е р н ы ш е в М. К. Синтез некоторых трансцендентных передаточных функций при помощи решающих элементов аналоговых вычислительных машин.- В сб.: Теория аналоговых и комбинированных вычислительных машин . М., Наука , 1969. Г ЛАВА 6 . ТОЧНОСТЬ АВМ 1. Основы теории точности Точность моделирования физического процесса на вычислительной машине - свойство машины, характеризующее отличие реальных (приближенно-вычисленных, машинных) величин х it), i = 1, п (f - независимый аргумент, в частном случае время) от соответствующих идеальных (моделируемых) переменных Xjiit) процесса. В качестве количественных показателей точности обычно используются следующие величины [3]:
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


