
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Аналоговые вычисления Продолжение табл. 5.6 Основные четырехполюсники Моделирующие операционные элементы Основные четырехполюсники Моделирующие операционные элементы    -CZ.,-  которыми оии соединяются между собой в единую схему. Напряжения относительно земли на двух из них (верхних) соответствуют напряжениям на входе и выходе моделируемого четырехполюсника, а напряжения на двух других (нижних) - входному и выходному токам. Основные четырехполюсники и моделирующие их операционные блоки приведены в табл. 5.6. При сопряжении моделей четырехполюсников необходимо согласовать входы и выходы операционных усилителей, входящих в соединяемые операционные блоки. Последовательные и параллельные двухполюсники моделируемой цепи Z(p) и К(р) непосредственно и наглядно отображаются в виде прямых и дуальных двухполюсников в цепях операционных усилителей моделирующих блоков. Это относится и к моделированию нелинейных элементов. Рассмотрим методы реализации цепи модели на примерах, сходных с теми, которые были использованы для пояснения метода прямых аналогий (гл. 1.3). Цепочечная механическая система (рис. 5.34, а), представленная пассивными четырехполюсниками по первой системе аналогий в виде электрической цепи рис. 5.34, б, а по второй системе аналогий - в виде электрической цепи рис. 5.34, г, приводится заменой четырехполюсников соответствующими блоками табл. 5.6 к моделям рис. 5.34, вид. Последние получились, как и требуется, одинаковыми. nif 6)2 гпг Вгз О-W-O-v-О --.о- 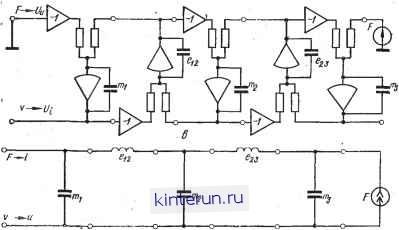 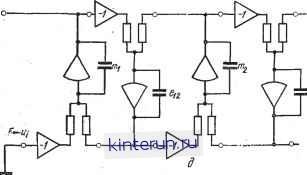 Рис. 5.34. К примеру применения моделей прямой аналогии на операционных элементах для моделирования цепочечной механической системы с двумя типами элементов.  rYV о-rvv>-С=1-0< 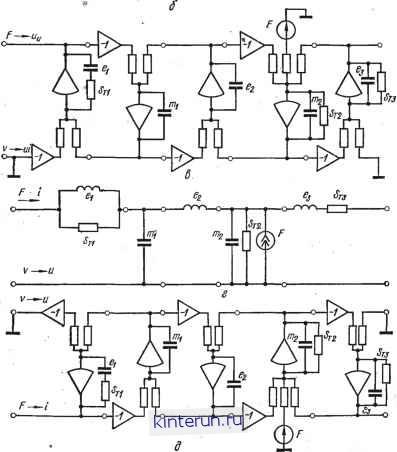 Рис. 5.35. Модели прямой аналогии на операционных элеменгах для исследовшшя сложной механической системы.
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


