
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Аналоговые вычисления и равно заданному при т где Ro, Со - погонные емкость и со противление линии. Распространенным вариантом [15] элемента обратной связи является схема замещения длинной линии, представляющая собой цепь Т*- или П-об-разных четырехполюсников (рис. 5.28), каждый из которых моделирует .отрезок линии Ах = Ип, где i - длина линии; п - число четырехполюсников. Рт. 5.27. Схема модели Иррациональной передаточной функции m/Yp на ОУ. -о о- -о о Рис. 5.28. Т- и П-образные четырех-полюсные звенья схем замещения длинной линии. Для П-образных четырехполюсников R = RoAx = Ro- 2С= СоДл;= Со- для Т-образных 2R = RoAx; С = САх. Число четырехполюсников определяется из выражения aVa V w ,где А - выбранная (заданная) величина относительной погрешности волнового сопротивления схемы замещения участка цепи четырехполюсником; и ©н- уровни, определяющие диапазон частот, пропускаемых моделируемым объектом. Рис. 5.29. Схема замещения и изображения RC-элемента из микропровода. Если в результате расчета получается большое количество четырехполюсников рассмотренной однородной схемы замещения (например, при tug/(Од = 100, А = 0,02 имеем п = 82), то используют неоднородную схему замещения, что позволяет резко уменьшить количество элементов модели [15]. В качестве экономичного и удобного элемента обратной связи ОУ используют ?С-элементы из микропровода в стеклянной изоляции [12], намотанного однослойно на металлический каркас (второй провод). iC-элементы являются аналогом длинной линии с распределенными параметрами R ъ С (рис. 5.29). При изготовлении элементов длина микропровода определяется до заданным погрешностям и интервалу частот. Например, при реализации /?С-элемента с максимальной относительной погрешностью переходной харак- теристики 5% при времени решения 100 с длина микропровода должна со ставлять около 5 км, что технологически и конструктивно вполне допустимо.. Включение малогабаритных ?С-элементов как двухполюсников в цепь обратной связи ОУ в сочетании с обычными элементами с сосредоточенными параметрами позволяет получить целый ряд моделей иррациональных передаточных функций (табл. 5.5). При этом ?С-элементы, амплитудно-фазовые харак теристики которых имеют погрешность по модулю в пределах 5%, а по фазе - 2° в диапазоне частот 0,005 Гц и более, обеспечивают хорошие точност ные показатели моделей. Комбинируя схемы, подобные приведенным в табл.. 5.5, можно строить модели более сложных передаточных функций [15]. \длп 4>f fV(t.C,.....Cn)di Рис. 5.30. Структурные схемы устройства для экспериментальной настройки параметров динамического линейного преобразо- Машиниая методика построения приближенных моделей. В тех случаях когда трудно построить модель по виду передаточной функции и применить расчетно-аналитические методы аппроксимации, применяются экспериментальные способы построения с использованием машинных методов аппроксимации. Заданными эталонными динамическими характеристиками могут служить переходные V{t) или импульсные переходные V (0 функции, которые однозначно связаны с передаточной функцией W(p) и между собой при помощи: t равенства V{f) = JVjj(T)dT. Причем, импульсная переходная функция является реакцией системы на возмущение в виде дельта-функции, а переходная, функция представляет собой реакцию на единичную ступенчатую функцию, т. е. на интеграл от дельта-функции. Экспериментальное построение модели выполняется подбором параметров некоторой схемы, состоящей из решающих блоков и имеющей заранее, выбранную постоянную или изменяющуюся в процессе настройки структуру. Таким образом, АВМ используется в качестве устройства, способного моделировать широкий класс динамических объектов и допускать перенастройку для воспроизведения заданных характеристик. Такое устройство по аналогии. Передаточная функция Переходная характеристика Схема моделирования kiVs 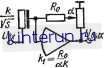 Vs 2k.. tVs + 1 h {l - exp ~ ет1сУ ~ ГЦ
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


