
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Аналоговые вычисления Объекты с распределенными параметрами, в отличие от объектов с сосредоточенными параметрами, не имеют общей формы записи выражений для передаточных функций, которые представляют собой иррациональные или трансцендентные выражения (относительно переменной р). Примерами могут служить следующие выражения. Передаточная функция объекта индукционного нагрева [4], связывающая температуру материала (реакция) с мощностью на единицу поверхности (входное возмущение), в зависимости от принимаемых допущений описывается одной из формул ТГ, (X. р) = (X, р) Wsix,p) = Vp(i+Vc) где X - пространственная координата; flj, flj, а, а, 6f, b, bg, Cf, - постоянные коэффициенты, определяемые параметрами объекта. Широкое распространение в качестве элементов автоматики получили звенья постоянного запаздывания, передаточные функции которых имеют вид 4(р)=е-*Р, где k - постоянная величина. Ряд объектов типа длинной линии (трубопроводы, кабели и т. д.) описываются передаточными функциями вида Моделирование дробно-рациональных передаточных функций Под моделированием некоторой передаточной функции W(p) понимается построение и использование реального устройства (модели), позволяющего получить на его выходе функцию x{t) ф Х(р) при задании иа входе функции f{f) = F{p), которые связаны между собой выражением X(p)=W{p)F{p). Для моделирования передаточной функции вида (5.69) удобно испо,льзо-еэть специальные методы построения решающих схем по заданным выражениям для W(p), из которых наиболее распространены следующие методы. Приведение к интегральной форме. Моделируемое выражение записывается в виде эквивалентной (5.69) зависимости (5.70) i=m-fl представляющей собой интегральную форму записи моделируемой передаточной функции при m < п и из которой видно, что модель строится в виде цепи из п интеграторов УИ1 -. УИп, сумматора УС1 и инвертора УС2. На входы каждого интегратора подается выходное напряжение всей модели x(t) и, кроме того, на входы первых т интеграторов должен поступать входной сигнал f{t). Схема модели показана на рис. 5.23, а. Достоинство схемы состоит в том, что для настройки коэффициентов передачи используются непосредственно eie еде 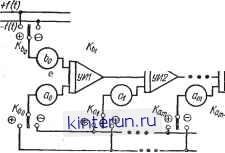 - УИп. - ycf- УС21 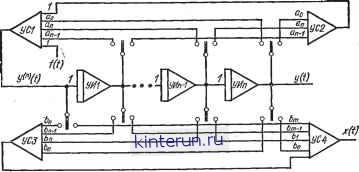 Рис. 5.23. Схема моделирования дробно-рациональных функций общего вида с приведением: а - к интегральной форме; б - к системе двух уравнений. коэффициенты моделируемого выражения (5.69). Положения ключей и Kli зависят от знаков коэффициентов а и Ьу и могут быть определены из табл. 5.3. При т = п зависимость (5.70) преобразуется в выражение п-\ X(p) = -;i[6£F(p)-0£X(p)]-f b F(p)-(a -l)X(p), (5.71) откуда видно, что при неравных нулю коэффициентах функция / (t) должна поступать на все п интеграторов. Таблица 5.3
При /и = О зависимость (5.70) преобразуется в выражение Х(р)--п(Р)-S ii i-iP)-K-l)X(р). (5.72) для моделирования которого схема рис. 5.23, а значительно упрощается. Применение выражений (5.70) - (5.72) и соответствующих им схем целе-сообразно при больших положительных а . При появлении в модели неустойчивых контуров следует преобразовать исходное выражение (5.68). ИноГда полезно разделить обе части его на а . Приведение к системе двух уравнений. Исходная передаточная функция представляется в виде произведения W(p) = B{p)- А{р)- а моделируемое выражение в виде системы Х(р) = В(р)¥(р); А{рУ (Р)=ЁЬ,-А(Р); l(p) = --f (р). (5.73) (5.74) (5.75) (5.76) Модель системы (5.75), (5.76) для случая т = п и а = 1 показана на рис. 5.23, б. В основу ее положена схема, содержащая интеграторы УШ-УИп, четыре сумматора и моделирующая выражение (5.76). Она построена как модель для решения эквивалентного дифференциального уравнения относительно t/{f) =i Y(p). Этот способ моделирования (5.76) дает возможность получать на выходах интеграторов и сумматора УС1 все п производные функции y{t), которые затем суммируются с умножением на коэффициенты Ь, bi,..., b посредством сумматоров УСЗ и УС4, что позволяет воспроизвести выражения (5.75) и получить функцию *(/) при поступлении на вход сумматора УС1 функции ЯО. Применение пар сумматоров УС1 - УС2, УСЗ - УС4 и знаковых ключей обеспечивает ввод коэффициентов с произвольными знаками.
|
|||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


