
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Аналоговые вычисления При реализации способа скольжения целесообразна организация автоматического движения к границе или вдоль границы гиперобъема и участие оператора в этапах перехода к последующему движению при достижении точек смены неравенств (точки Л и В на рис. 5.19). При увеличении числа переменных описанный алгоритм сохраняется. Отличие заключается лишь в том, что движение на границе должно совершаться по гиперповерхности, так чтс при изменении одной из переменных следует изменять в общем случае большее число переменных. Изменение переменных х,..., происходит на основании решения системы уравнений fi{xi,..., хд = О для различных значений Xi методами, описанными в § 5. Задачи внешнего моделирования Рис. 5.20. Схема регулируемого перекрестка. Задачами внешнего моделирования называются задачи, решение которых на аналоговой машине дает возможность ознакомиться с внешним проявлением моделируемого процесса и не отображает физическую основу явления. При решении подобных задач математическая формулировка их не обязательна - необходимо лишь сохранение внешнего подобия в отношении получаемых или исследуемых результатов. Задача управления уличным движением. На рис. 5.20 показана схема, регулируемого перекрестка. Скорость приближения транспортных единиц к перекрестку обозначена через Qi{M) и Q,-(m) для основной и второстепенной магистралей соответственно..Скорость движения от перекрестка обозначена через Qu(M) и Qo(m). Задачей моделирования является выбор такого режима работы светофора, при котором длина очереди машин у перекрестка будет минимальной. Моделирование учитывает то положение, что транспорт не сразу набирает скорость при включении зеленого сигнала, так как О при красном сигнале; Qi при зеленом свете, если длина очереди Z,-<1; / (f) при зеленом свете, если L > 1, где f{t) характеризует как время реакции водителя на изменение сигнала чТак и ускорение транспорта в начале движения и может быть упрощено и представлено в форме /(0=Л(1-е -*), где А - максимально разрешенная скорость движения; k - постоянный коэффициент. Изменение длины очереди L у светофора определяется соотношением (5.67) Схема электрической модели движения транспорта у перекрестка для одного направления показана на рис. 5.21. Генератор шума образует напряжение с нормальным законом распределения; усилители РУ1 и РУ2 используются для образования лишь положительных напряжений, так как скорость тргнс-порта не может быть отрицательной, и для одновременного образования с помощью делителей напряжения ДН1 и ДН2 и диодов Д1 и Д2 зоны с нулевыми скоростями Qt (зона нечувствительности), когда транспорт не подходит к перекрестку. Изменение положений ползунков потенциометров ДЯ/и ДЯ2 приводит к изменению средней плотности появления транспорта у перекрестка, а изменение коэффициента передачи усилителя РУ2 - к изменению сред- le частоты шя
Изменение стрости * Изменение ускорения 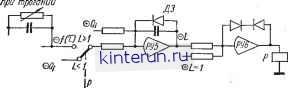 Рис. 5.21. Схема моделирования движения на перекрестке. Скорость расхода Выход ней скорости, с которой транспорт подходит к перекрестку; Усилитель РУ4 воспроизводит зависимость f{f). Усилитель РУ5 образует длину очереди по выражению (5.67); диод ДЗ используется для выполнения условия L 0. Усилитель РУ6 является схемой сравнении и управляет работой реле, которое изменяет второе входное напряжение усилителя РУ5 в зависимости от длины очереди. Складская задача. Построение схемы моделирования изменения запасов товара одного вида на складе дает возможность ставить и решать вопросы, рассматриваемые с различных точек зрения - временной последовательности, амплитудной последовательности и стоимостных оценок. С точки зрения временной последовательности исследователя могут интересовать различные виды расхода товара - непрерывный или дискретный, когда дополнительно к размеру партии расхода указываются моменты расходования, регулярный или случайный порядок расходования товара. Заказ товара для поставки может производиться в фиксированные моменты времени и в моменты, когда запасы уменьшаются до определенной величины; при выполнении заказа может произойти задержка в поставке товара, причем время задержки может быть фиксированным, случайным нли функцией объема заказанной партии. При подходе к решению поставленной задачи с позиций амплитудной последовательности исследователя могут интересовать размеры начальных и конечных значений запасов, скорости и партии расхода и, наконец, размеры пополнения партий. При применении стоимостных оценок могут учитываться 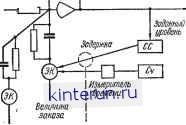 Дискретный Генератор шума Рис. 5.22. Схема моделирования изменения запасов. стоимость хранения и убытки из-за невыполнения заказа при отсутствии товара на складе. Схема моделирования изменения запасов, с помощью которых возможно уточнение всех перечисленных выше параметров, показана на рис. 5.22. В этой схеме величина запаса в функции времени образуется в форме напряжения на выходе интегрирующего усилителя, на вход которого при непрерывном расходе поступает напряжение, пропорциональное скорости расхода товара. Для скачкообразного изменения запасов при дискретном расходовании или при заказе усилитель снабжается двумя дополнительными емкостными входами, напряжение к которым может подключаться либо по времени (счетчик и измеритель времени) по заранее заданной программе, либо по уровню запасов с помощью схемы сравнения. При необходимости в цепь управления может включаться переменная временная задержка. Выходное напряжение схемы можно не только наблюдать визуально, но и использовать для определения стоимости хранения, штрафов и других переменных, значения которых определяются запасом товаров на складе. 8. Моделирование передаточных функций . Передаточные функции используются при анализе и синтезе линейных динамических объектов. Если линейный объект с сосредоточенными постоянными параметрами, имеющий один выход и один вход, описывается обыкновенным дифференциальным уравнением вида J,a\t) = bf{f), (5.68) где х{1)фХ (р) - выходной сигнал (реакция) объекта; f(t)=F(p) - входное воздействие (возмущение); а н bj - постоянные коэффициенты,то после перехода в (5.68) к изображениям (по Лапласу) передаточная функция рассматриваемого объекта определяется как отношение изображения выходного сигнала к изображению входного при нулевых начальных условиях, т. е. в виде рациональной дроби m 1=0 Соотношение m < п представляет собой условие физической реализуемости передаточной функции (5.69). Передаточные функции объектов с распределенными параметрами, описываемых дифференциальными уравнениями в частных производных, определяются также посредством перехода к изображениям для входных сигналов и реакций. При этом [1,4], как правило, путь получения передаточной функции состоит в применении преобразования Лапласа к исходным уравнениям в частных производных и граничным условиям по временной независимой переменной, что позволяет перейти к операторному уравнению, в котором р рассматривается как параметр, а независимой переменной является пространственная координата. Решая операторное уравнение (или систему) аналитически, получают выражение для изображения реакции объекта, отношение которого к изображению входного возмущения (обычно это начальное условие) дает искомую передаточную функцию для произвольного значения пространственной координаты.
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


